ГОСТ Р МЭК 870-5-5-96
Группа П77
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 5. Протоколы передачи
Раздел 5. Основные прикладные функции
Telecontrol equipment and systems.
Part 5. Transmission protocols.
Section 5. Basic application functions
ОКС 33.200
ОКП 42 3200
Дата введения 1997-07-01
Предисловие
1 РАЗРАБОТАН АО “Научно-исследовательский институт электроэнергетики (ВНИИЭ)”
ВНЕСЕН Министерством топлива и энергетики Российской Федерации и Российским акционерным обществом энергетики и электрификации “ЕЭС РОССИИ”
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 24 апреля 1996 г. N 294
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 870-5-5-95 “Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 5. Основные прикладные функции”
3 ВВЕДЕН ВПЕРВЫЕ
1 ВВЕДЕНИЕ
1 ВВЕДЕНИЕ
Настоящий стандарт устанавливает общие функциональные требования к набору основных прикладных функций в системах телемеханики.
1 ОБЛАСТЬ ПРИМЕНЕНИЯ И ОБЪЕКТ
Настоящий стандарт распространяется на устройства и системы телемеханики с передачей данных последовательными двоичными кодами для контроля и управления территориально-распределенными процессами.
Стандарт определяет основные прикладные функции, которые выполняют стандартные процедуры систем телемеханики. Основные прикладные функции являются пользовательскими процедурами, которые находятся вне уровня 7 (пользовательский уровень) модели МОС (ISO)* для связи открытых систем. Определяемые прикладные функции используют стандартный сервис на уровне пользователя. Определения настоящего стандарта служат базовыми для различных сопутствующих (вспомогательных) стандартов, которые будут детально разработаны для отдельных телемеханических задач. Каждый сопутствующий стандарт может использовать специфический набор определяемых функций. Основные прикладные функции, которых нет в настоящем стандарте, но которые необходимы для формирования сопутствующих стандартов по телемеханике, должны быть определены в этих сопутствующих стандартах. Только определенность сопутствующих стандартов дает возможность совместной работы различной аппаратуры телемеханики.
________________
* МОС - Международная организация по стандартизации.
ISO - International Organization for Standardization.
Общая структура ASDU*, используемых в процедурах, описанных в настоящем стандарте, определена в ГОСТ Р МЭК 870-5-3.
_______________
* ASDU - Application Service Data Unit - Пользовательский сервис данных (ГОСТ Р МЭК 870-5-3).
Настоящий стандарт должен применяться совместно с ГОСТ Р МЭК 870-5-1, ГОСТ Р МЭК 870-5-2, ГОСТ Р МЭК 870-5-3 и ГОСТ Р МЭК 870-5-4.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ Р МЭК 870-5-1-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 1. Форматы передаваемых кадров
ГОСТ Р МЭК 870-5-2-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 2. Процедуры в каналах передачи
ГОСТ Р МЭК 870-5-3-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 3. Общая структура данных пользователя
ГОСТ Р МЭК 870-5-4-96 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 4. Определение и кодирование элементов пользовательской информации
3 ОПРЕДЕЛЕНИЯ
В настоящем стандарте использованы следующие определения:
3.1 Основная прикладная функция (в телемеханике) - процедура передачи, выполняющая функции контроля и управления, обычно используемые в системах телемеханики.
Примеры: передача команд, передача о возникновении событий, циклическая передача и т.д.
3.2 Сопутствующий стандарт (вспомогательный) - сопутствующий стандарт добавляет семантику в основные стандартные определения или в функциональный профиль. Это может быть выражено определением особых целей для объектов информации и определением дополнительных объектов информации, сервисных процедур и параметров основного стандарта.
Примечание - Сопутствующие стандарты не вносят изменения в стандарты, к которым они относятся, но делают более ясными взаимосвязи при их совместном применении для определенной области деятельности.
3.3 Укрупненная структура (ЕРА) - укрупненная модель сравнима с семиуровневой структурой основной модели, однако имеет трехуровневую структуру для получения меньшего времени реакции на важную информацию, но сервис при этом ограничен.
3.4 Составное поле данных (СР) - последовательность полей данных с последовательным распределением битов, которые образуют элемент информации.
3.5 Направление команды - направление передачи от пункта управления (ПУ) к контролируемому пункту (КП).
3.6 Направление контроля - направление передачи от КП к ПУ.
4 СЕРВИС ПОЛЬЗОВАТЕЛЯ
Каждый процесс пользователя может иметь “первичную функцию пользователя” и “вторичную функцию пользователя”. “Первичная функция пользователя” - это часть процесса пользователя, которая инициирует запросы пользователя к удаленному объекту пользователя при помощи “вторичной функции пользователя”, принадлежащей последнему. Запрашиваемые задачи исполняются при помощи сервиса связи, который включает в себя передачу PDU*. Последовательность процедур сервиса связи описана при помощи последовательности сервисных примитивов.
_______________
* PDU - Protocol data unit - протокол блока данных.
4.1 Сервисные примитивы пользователя
Первичный пользователь инициирует функцию сервисным примитивом “запрос”. Сквитированный сервис пользователя требует ответов от вторичного пользователя. Вторичный пользователь возвращает соответствующие ответы сервисными примитивами ответа, которые доставляются к первичному пользователю сервисным примитивом подтверждения (рисунок 1).
Рисунок 1 - Основные сервисы пользователя
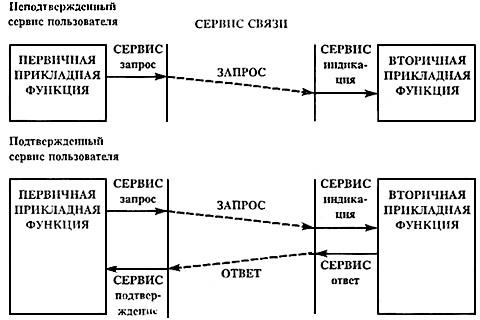
Рисунок 1 - Основные сервисы пользователя
| Сервис. запрос ( . req) | - первичный пользователь посылает запрос при помощи этого сервисного примитива удаленной вторичной функции пользователя через сервис связи. | |||
| Сервис. индикация ( . ind) | - сервис связи использует этот сервисный примитив для доставки сервисного запроса индикации к вторичной функции пользователя. | |||
| Сервис. ответ ( . res) | - вторичная функция пользователя использует этот сервисный примитив для ответа на запрос от сервиса связи. | |||
| Сервис. подтверждение ( . con) | - сервис связи использует этот сервисный примитив для доставки ответа от вторичной к первичной функции пользователя. | |||
5 ОБЩАЯ КОНЦЕПЦИЯ ПРИКЛАДНЫХ ФУНКЦИЙ
Процессы пользователя, которые применяют связь точка-точка для выполнения согласованных процедур между удаленными пунктами, используют средства, которые имеются на уровнях 7, 2 и 1 модели ЕРА (рисунок 2).
Рисунок 2 - Расположение сервисов связи и прикладных функций в мдели ЕРА (укрупненная модель)
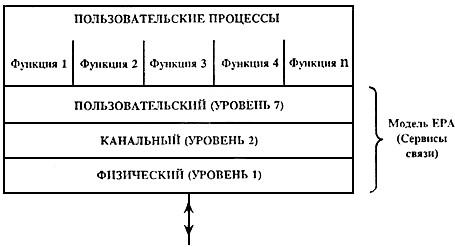
Рисунок 2 - Расположение сервисов связи и прикладных функций в мдели ЕРА (укрупненная модель)
Одновременно могут происходить более одной процедуры (на разных станциях). Однако процедуры прикладных функций описываются каждая отдельно. Процедуры определяются в едином иерархическом изложении. Дополнительные определения при использовании многоиерархических телемеханических сетей (например, сети с концентраторами) указаны в сопутствующих стандартах.
Отдельные прикладные функции используют сервисные примитивы и элементы процедур передачи на уровнях 7, 2 и 1, как это определено в настоящем стандарте и в ГОСТ Р МЭК 870-5-1, ГОСТ Р МЭК 870-5-2, ГОСТ Р МЭК 870-5-3, ГОСТ Р МЭК 870-5-4.
Прикладные функции являются частью процессов пользователя и выполняют процедуры связи между процессами пользователя.
Нижеследующие пункты настоящего стандарта определяют набор основных прикладных функций. Каждая функция состоит из передачи определенных сервисных процедур между удаленными процессами пользователя. Содержание информации, форматы кадров различных PDU и списки параметров сервисных примитивов определяются выбранными сопутствующими стандартами.
6 ОСНОВНЫЕ ПРИКЛАДНЫЕ ФУНКЦИИ
Настоящий раздел определяет набор основных прикладных функций, которые используют стандартный сервис связи. Функции описаны с помощью диаграмм, показывающих последовательность блоков данных, которыми обмениваются КП и ПУ, и путем описания задач блоков данных, выполняющих эти функции. Первые две описанные основные прикладные функции, а именно инициализация пунктов и сбор данных при помощи опроса, являются базовыми для других основных прикладных функций. Эти две функции выполняются путем взаимодействия специального сервиса на пользовательском и канальном уровнях и описаны в деталях. Другие основные прикладные функции, которые могут включать использование процедур опроса, описываются без повторения деталей.
Последовательность процедур передачи показана стрелками. Каждая стрелка представляет протокол блока данных PDU. Иерархическая структура символов будет использоваться для обозначения APDU или ASDU; она может быть дополнена различными сопутствующими стандартами. В протоколах ГОСТ Р МЭК 870-5-1, ГОСТ Р МЭК 870-5-2, ГОСТ Р МЭК 870-5-3, ГОСТ Р МЭК 870-5-4 и настоящего стандарта определения APDU* и ASDU одинаковы, т.к. нет явно выделенного APCI*.
________________
| * APDU - пользовательский протокол блока данных |
|
В таблице, приведенной ниже, указаны метки ASDU, расположенные в иерархическом порядке, что предполагает возможность использования общих меток в настоящем стандарте и особых меток - в различных сопутствующих стандартах.
К высшему уровню принадлежат:
| Вид информации Уровень 1 | Метка | |||
| Контрольная информация | М | |||
| Управляющая (командная) информация | С | |||
| Параметр | Р | |||
| Передача файла | F | |||
| Второй уровень определяет: | ||||
| Вид информации Уровень 2 | Метка | |||
| Контрольная информация | М | |||
| Одноэлементная информация | М_SP | |||
| Двухэлементная информация | М_DP | |||
| Измерения | М_ME | |||
| События (работа) защиты | М_ЕР | |||
| Интегральные суммы | М_IT | |||
| Информация о ступенчатых перемещениях | М_ST | |||
| Строки битов и байтов | М_ВО | |||
| Конец инициализации | М_EI | |||
| Доступность пользовательского уровня | М_АА | |||
| Управляющая информация | С | |||
| Однопозиционная команда | С_SC | |||
| Двухпозиционная команда | С_DC | |||
| Команда уставки | С_SE | |||
| Команда пошагового регулирования | С_RC | |||
| Команда опроса | С_IC | |||
| Команда синхронизации по времени | С_CS | |||
| Определение запаздывания | С_CD | |||
| Команда опроса показаний счетчика | С_CI | |||
| Тестовая команда | С_TS | |||
| Команда установки процесса в исходное состояние | С_RP | |||
| Команда считывания | С_RD | |||
| Конец инициализации | С_ЕI | |||
| Параметр | Р | |||
| Измеряемые параметры | Р_ME | |||
| Активация | Р_АС | |||
| Передача файла | F | |||
| Каталог (структура данных) | F_DR | |||
| Выбор или вызов файла или секции | F_SC | |||
| Последняя секция или сегмент | F_LS | |||
| Подтверждение приема (АСК) файла или секции | F_AF | |||
| Готовность файла | F_FR | |||
| Готовность секции | F_SR | |||
| Сегмент | F_SG | |||
Третий уровень используется разными сопутствующими стандартами и определяет тип ASDU, использование метки времени и т.п. Первая буква в третьем уровне определяет наличие метки времени (N - нет метки времени, Т - метка времени), вторая буква определяет тип. Каждый сопутствующий стандарт может устанавливать свои собственные типы в алфавитном порядке, начиная с буквы “А”. Например:
| Измерения, нормализованные величины без метки времени (тип А) | M_ME_NA | |||
| или | ||||
| Измерения, масштабированные величины с отметкой времени (тип В), | М_МЕ_ТВ | |||
| или | ||||
| Одиночная команда, без метки времени (тип А) | C_SC_NA | |||
Кроме того, добавляется последняя цифра, показывающая какой сопутствующий стандарт определяет метку ASDU. Например:
| Сопутствующий стандарт 101 | M_ME_NA_1 | или C_SC_NA_1 | |||
| Сопутствующий стандарт 102 | M_ME_NA_2 | или C_SC_NA_2 | |||
Такая система меток открыта и может при необходимости дополняться на всех иерархических уровнях и в различных сопутствующих стандартах.
ASDU, используемая в направлении КП, может иметь зеркальное отражение в направлении ПУ. Такое зеркальное отражение ASDU используется для положительного/отрицательного подтверждения (квитанции). Необходимо, чтобы была возможность их отличия в обоих направлениях. Поэтому, кроме меток, эти ASDU маркируются следующей аббревиатурой в направлении КП и ПУ:
| Направление КП: | Активация | ACT | |||
| Направление ПУ: | Подтверждение активации | ACTCON | |||
| Направление КП: | Дезактивация | DEACT | |||
| Направление ПУ: | Подтверждение дезактивации | DEACTCON | |||
| Направление ПУ: | Прекращение активации | ACTTERM | |||
| Кроме того, используются следующие аббревиатуры: | |||||
| Направление ПУ: | Циклическая передача | CYCLIC | |||
| Направление ПУ: | Спорадическая передача | SPONT | |||
В случае небалансной процедуры передачи команда ACT может быть передана при помощи сервиса канала SEND/NO REPLY (посылка/без ответа) как общее сообщение (например, для опроса станции или синхронизации часов). Затем обратно передается сигнал подтверждения ACTCON, что сообщение ACT получено, индивидуально на каждый КП.
6.1 Инициализация работы станций
Процедура инициализации работы станции требуется для установки станции в правильное рабочее состояние до того, как начнутся телемеханические операции. Необходимо различать холодную и горячую процедуры запуска. Холодный запуск - это процедура первоначальной загрузки станции, чтобы привести базу данных в текущее состояние. Предполагается, что информация о переменных процесса сброшена в исходное состояние до загрузки. Горячий запуск - это процедура перезагрузки станции, которая устанавливается в исходное состояние или повторно активируется. Эта процедура означает, что информация о переменных процесса, полученная до повторной активации, не будет сброшена. Кроме того, различается инициализация КП и ПУ. Определения, приведенные ниже, рассматривают в основном процедуры инициализации, связанные с передачей данных между станциями.
ПУ часто оснащены избыточным оборудованием для управления и хранения базы данных, что гарантирует переключения без потери информации в случае повреждения активного оборудования управления. В этом случае нет необходимости в инициализации общего опроса базы данных ПУ. Однако после перерыва напряжения питания для обновления или общего сброса всего ПУ процедура общего опроса (см. 6.6) и в некоторых системах процедура временной синхронизации (см. 6.7) обязательны.
КП может устанавливаться в исходное состояние по местной команде или по запросу с ПУ.
6.1.1 Описание основной процедуры инициализации (рисунок 3)
Рисунок 3 - Последовательная процедура - основная процедура инициализации
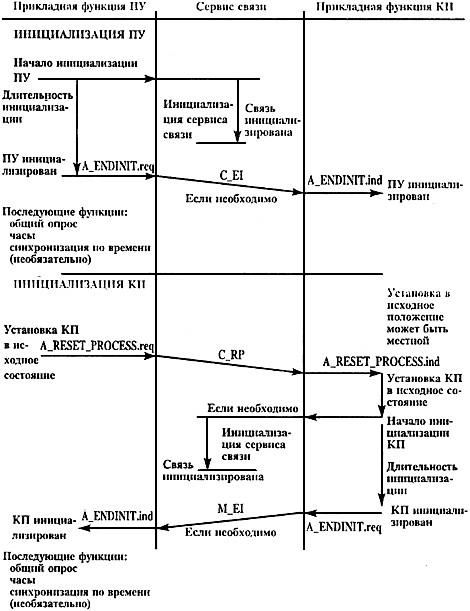
Рисунок 3 - Последовательная процедура - основная процедура инициализации
На рисунке 3 показана инициализация ПУ и КП в общем виде. Более детальное определение, включая используемый сервис связи, приведено на последующих рисунках.
Инициализация контролирующей станции (ПУ).
После внутренней инициализации ПУ уровень канала устанавливает соединение с КП (см. 6.1.2, 6.1.5 и ГОСТ Р МЭК 870-5-2). Когда ПУ готов к передаче информации на КП, он посылает (необязательно) сообщение С_ЕI (конец инициализации) к подсоединенному КП. После приема PDU С_ЕI КП может послать информацию о процессе к ПУ. ПУ затем посылает общий запрос (см. 6.6) с синхронизацией по времени (см. 6.7) (необязательно).
Инициализация КП.
При необходимости после внутренней инициализации КП уровень канала устанавливает соединение с ПУ (см. 6.1.3, 6.1.6 и ГОСТ Р МЭК 870-5-2). Если КП готов обрабатывать информацию, поступающую с ПУ, он может послать PDU M_EI к ПУ (необязательно). После получения этого PDU ПУ продолжает посылку общего запроса (см. 6.6), в некоторых системах - с синхронизацией по времени (см. 6.7).
6.1.2 Инициализация ПУ в небалансных системах передачи (описание последовательности процедур; рисунок 4)
Рисунок 4 - Последовательная процедура - инициализация ПУ в небалансных системах передачи

Рисунок 4 - Последовательная процедура - инициализация ПУ в небалансных системах передачи
Если “Начало местной инициализации” появляется сразу после данных, запрошенных с КП (например, как показано пунктиром на рисунке 4), то канал связи ПУ не может получить запрошенные данные, т.к. они уже недоступны. После начала инициализации ПУ уровень канала обычно устанавливается в исходное состояние и становится доступным раньше, чем другие внутренние функции ПУ во время его инициализации. Канал ПУ затем устанавливает соединение с каналом КП посылкой сообщения “Запрос состояния канала", на что получает ответ “Состояние канала”. Для установления синхронизации канала ПУ передает команду “Установка удаленного канала в исходное состояние” и получает ответ “АСК”. Это “АСК” подтверждает начальные условия уровня канала на ПУ, ожидая следующий бит счета кадров (FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). Состояние удаленного уровня канала может быть дополнительно опрошено при помощи команды “Запрос состояния канала”. После завершения инициализации прикладных функций на ПУ соединение между прикладными функциями устанавливается передачей PDU C_EI на КП. В системах, в которых установление соединения канала происходит после завершения инициализации прикладных функций на ПУ, передача PDU С_ЕI не требуется. После инициализации ПУ обновляет информацию общим запросом (см. 6.6) и в некоторых системах синхронизируется по времени (см. 6.7). После этого могут начинаться обычные телемеханические операции.
6.1.3 Местная инициализация КП в небалансных системах передачи (описание последовательности процедур; рисунок, 5)
Рисунок 5 - Последовательная процедура - местная инициализация КП в небалансных системах передачи
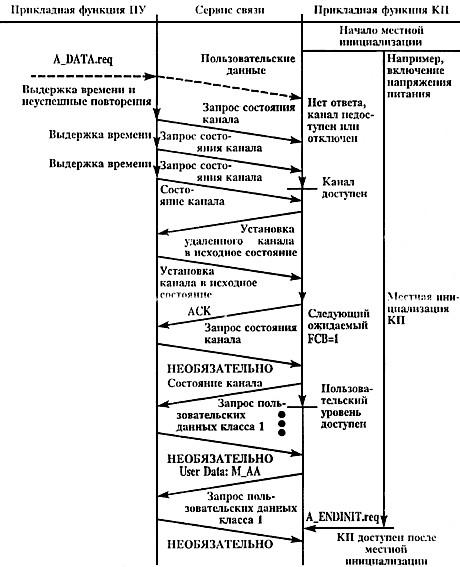
Рисунок 5 - Последовательная процедура - местная инициализация КП в небалансных системах передачи, лист 1
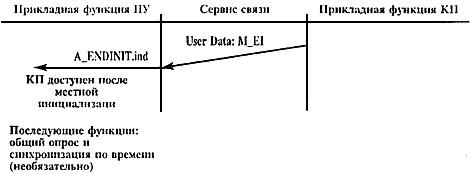
Рисунок 5, лист 2
После начала местной инициализации КП во время работы с ПУ ПУ определяет, что его канал отсоединен от КП ввиду отсутствия подтверждения. После определенного числа безуспешных повторений (приложение А ГОСТ Р МЭК 870-5-2) ПУ пытается установить соединение канала посылкой повторных команд “Запрос состояния канала” с определенной выдержкой времени. Если канал на КП доступен, то приходит ответ “Состояние канала”. Тогда ПУ передает “Установка удаленного канала в исходное состояние”. КП подтверждает условия установки сигналом "АСК” к ПУ (ожидаемый бит счета кадров FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). Теперь ПУ может запрашивать КП повторением посылки “Запрос состояния канала”. Если ответ будет “Состояние канала”, что означает, что данные класса 1 доступны, то данные запрашиваются при помощи посылки “Запрос данных пользователя класса 1” и могут быть подтверждены сообщениями М_АА (прикладной уровень доступен) или M_EI (конец инициализации). Окончание инициализации прикладных функций на КП может быть показано ПУ посредством посылки PDU М_ЕI. Затем ПУ обновляет свою информацию передачей общего запроса (см. 6.6) и продолжает работать в некоторых системах с синхронизацией времени (см. 6.7). После этого можно начинать обычные телемеханические операции.
Примечание - М_АА применяется, когда ПУ информирован о готовности всей системы связи вдобавок к готовности уровня канала (что показывается сервисом канала “Состояние канала”).
6.1.4 Дистанционная инициализация КП в небалансных системах передачи (описание последовательности процедур; рисунок 6)
Рисунок 6 - Последовательная процедура - дистанционная инициализация КП в небалансных системах передачи
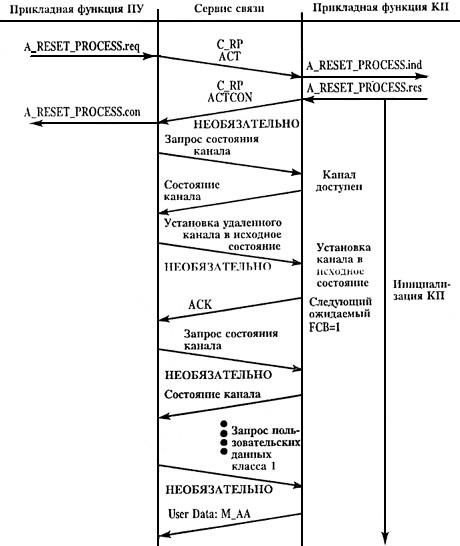
Рисунок 6 - Последовательная процедура - дистанционная инициализация КП в небалансных системах передачи, лист 1
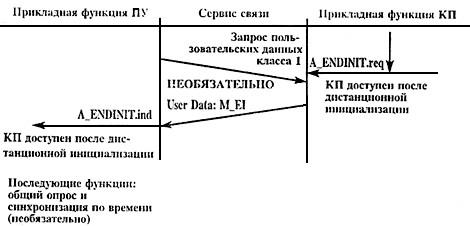
Рисунок 6, лист 2
После получения дистанционной команды RESET_PROCESS C_RP ACT КП может ответить подтверждением RESET_PROCESS C_RP ACTCON. После опознания или необязательного подтверждения команды RESET_PROCESS все процессы пользователя выше уровня 7, как показано на рисунке 2, устанавливаются в исходное состояние и инициализируются. Все сообщения, ожидающие передачи, сбрасываются. ПУ опрашивает канал передачей посылки “Запрос состояния канала”. Если канал КП доступен, он отвечает “Состояние канала”. ПУ может передать сообщение “Установка удаленного канала в исходное состояние” вместе с командой RESET_PROCESS C_RP ACT (необязательно). КП подтверждает условия начала сигналом “АСК” (ожидаемый бит счета кадров FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). После этого ПУ может опросить КП повторной посылкой “Запрос состояния канала”.
Примечание - Если используется команда “Установка удаленного канала в исходное состояние”, то будет выполнена дистанционная инициализация всего КП.
Если на “Запрос состояние канала” ответ будет “Состояние канала”, это показывает, что данные класса 1 доступны. Данные запрашиваются посылкой “Запрос пользовательских данных класса 1”. Прием данных может быть подтвержден или сигналом М_АА (доступен уровень пользователя) или сигналом М_ЕI (конец инициализации). Оба эти сервиса на КП необязательны, т.к. на нем уровень канала доступен только после конца завершения инициализации.
Примечание - Описываемая процедура дистанционной инициализации повторно запускает функции процесса, когда прикладные функции на КП доступны. Если они недоступны, то все прикладные пользовательские процессы (прикладной уровень, прикладные функции и прикладные процессы) могут быть повторно запущены при помощи посылки функции обслуживания канала “Установка процессов пользователя в исходное состояние”.
6.1.5 Инициализация ПУ в балансных системах передачи (описание последовательности процедур; рисунок 7)
Рисунок 7 - Последовательная процедура - инициализация ПУ в балансных системах передачи
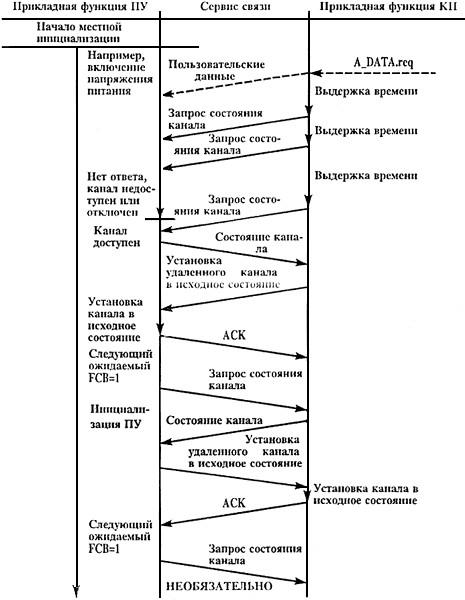
Рисунок 7 - Последовательная процедура - инициализация ПУ в балансных системах передачи, лист 1

Рисунок 7, лист 2
После начала инициализации ПУ КП определяет, что канал отсоединен от ПУ ввиду отсутствия подтверждения. КП пытается установить соединение канала, передавая сигнал “Запрос состояния канала” с определенной выдержкой времени. Если уровень канала ПУ доступен, он подтверждает это, посылая к КП сигнал “Состояние канала”, КП затем посылает сигнал “Установка удаленного канала в исходное состояние”, на что получает ответ “АСК”, который подтверждает условия установки на уровне канала ПУ (ожидаемый бит счета кадров FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). После этого ПУ синхронизирует соединение канала с КП, передавая посылки “Запрос состояния канала” и “Установка удаленного канала в исходное состояние”. После получения “АСК” соединение канала устанавливается в обоих направлениях. Состояние канала может быть опрошено на обоих станциях при помощи посылки “Запрос состояния канала” (на рисунке 7 показан опрос только со стороны ПУ). После окончания инициализации ПУ он может передавать сигнал С_ЕI (конец инициализации) на КП. Передача PDU С_ЕI необязательна в системах, которые устанавливают соединение канала после окончания инициализации пользовательских функций на ПУ. После инициализации ПУ обновляет информацию посылкой общего запроса (см. 6.6) и продолжает передачи в некоторых системах посредством синхронизации по времени (см. 6.7). Затем могут начаться обычные телемеханические передачи.
6.1.6 Местная инициализация КП в балансных системах передачи (описание последовательности процедур; рисунок 8)
Рисунок 8 - Последовательная процедура - местная инициализация КП в балансных системах передачи

Рисунок 8 - Последовательная процедура - местная инициализация КП в балансных системах передачи, лист 1
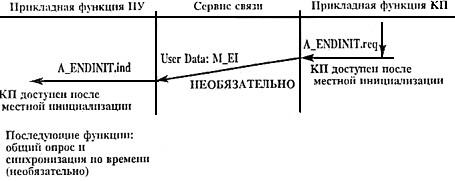
Рисунок 8, лист 2
После начала местной инициализации на КП во время работы с ПУ ПУ определяет, что канал отключен от КП ввиду отсутствия подтверждения. Через определенное число безуспешных повторений (см. приложение А ГОСТ Р МЭК 870-5-2) ПУ пытается установить соединение канала посылкой сигнала “Запрос состояния канала” с заданной выдержкой времени. Если канал КП доступен, то приходит ответ “Состояние канала”. Тогда ПУ передает сигнал “Установка удаленного канала в исходное состояние”. КП подтверждает условия установки при помощи "ACK", передаваемого на ПУ (ожидаемый бит счета кадров FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). Затем КП тоже синхронизирует свой канал с ПУ, передавая ей посылки “Запрос состояния канала” и “Установка удаленного канала в исходное состояние”. После приема сигнала “АСК” соединение канала устанавливается в обоих направлениях.
КП может показать доступность пользовательского уровня и/или окончание инициализации передачей на ПУ сигналов М_АА (пользовательский уровень доступен) и М_ЕI (окончание инициализации). Обе эти процедуры необязательны на КП, которые разрешают доступ к каналу после окончания инициализации.
6.1.7 Дистанционная инициализация КП в балансной системе передачи (описание последовательности процедур; рисунок 9)
Рисунок 9 - Последовательная процедура - дистанционная инициализация КП в балансных системах передачи
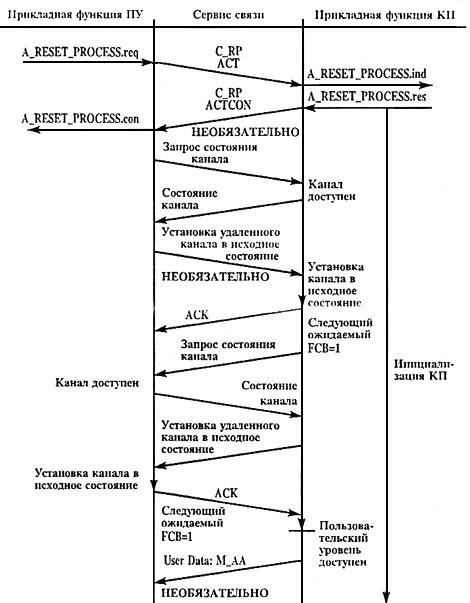
Рисунок 9 - Последовательная процедура - дистанционная инициализация КП в балансных системах передачи, лист 1
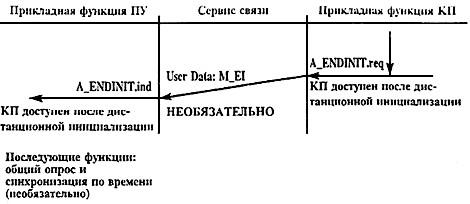
Рисунок 9, лист 2
После получения дистанционной команды RESET_PROCESS C_RP ACT КП отвечает подтверждением RESET_PROCESS C_RP ACTCON и начинает инициализацию процессов. ПУ опрашивает канал, передавая посылку “Запрос состояния канала”. Если канал на КП доступен, приходит ответ “Состояние канала”. Тогда ПУ может передать сигнал “Установка удаленного канала в исходное состояние” в добавление к команде RESET_PROCESS. КП подтверждает начальное состояние сигналом “АСК” на ПУ (ожидаемый бит счета кадров FCB = 1, см. 5.1.2 ГОСТ Р МЭК 870-5-2). ПУ синхронизирует канал с КП передачей посылок “Запрос состояния канала” и “Установка удаленного канала в исходное состояние”. Затем КП может (необязательно) передать на ПУ сигналы М_АА (пользовательский уровень доступен) и М_ЕI (окончание инициализации). Обе эти процедуры на КП необязательны, т.к. после окончания инициализации доступ к каналу восстанавливается.
Примечание - Описываемая процедура дистанционной инициализации повторно запускает функцию процесса, если прикладные функции на КП доступны. Если прикладные функции недоступны, то процесс пользователя может быть повторно запущен при помощи посылки сервисной функции канала “Установка процесса пользователя в исходное состояние”.
6.2 Сбор данных при помощи опроса
Сбор данных при помощи опроса используется в системах SCADA, работающих с небалансными процедурами передачи данных, чтобы получить на ПУ действительное состояние переменных процесса на КП. ПУ производит опрос КП. КП может передавать данные только, когда его опрашивают.
Последовательности опроса зависят от системы. Ждущие системы телемеханики используют последовательный опрос только для событий, в то время как чисто циклические системы применяют только последовательный опрос при циклической передаче данных. Системы допускают оба типа опроса. Определенные последовательности опроса должны допускать возможность динамических изменений, вызванных процессом пользователя. Обычный метод - это процедура последовательного опроса на КП циклических данных с низким приоритетом, которая может быть прервана запросом на связь, вызванным таким событием, как передача команд, запросы данных, зависящим от пользователя и т.п. Различные методы могут быть использованы для получения сообщений о событиях, возникающих на КП. Некоторые системы используют поочередный или перемежающийся последовательный опрос событий и циклических данных. Другие системы используют циклический последовательный опрос с целью оповещения о наличии событий в обратном цикле ответных данных.
Выбранная процедура опроса должна быть понятна процессу пользователя. Поэтому функция опроса осуществляется сервисом связи. В балансных системах функции опроса нет.
6.2.1 Описание последовательности процедур (рисунок 10)
Рисунок 10 - Последовательная процедура - процедура опроса
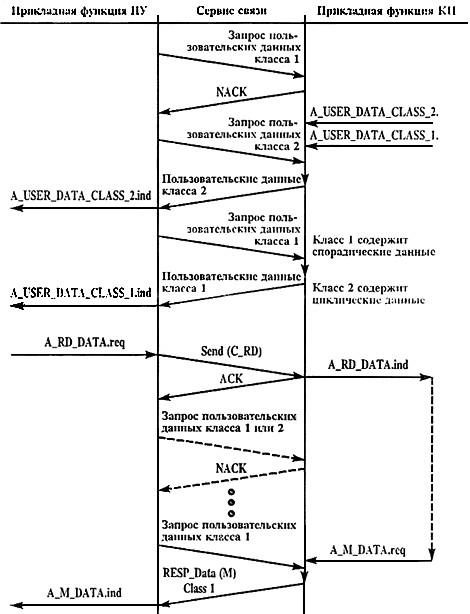
Рисунок 10 - Последовательная процедура - процедура опроса
На рисунке 10 показаны различные процедуры ОПРОСА, которые могут возникать при циклических и нециклических последовательностях ОПРОСА.
Первая процедура - это посылка “Запрос пользовательских данных класса 1”, которая генерируется сервисом связи на ПУ. На нее приходит ответ “АСК”. Это происходит в том случае, если нет событий, ожидающих передачи.
Следующая процедура - это посылка “Запрос пользовательских данных класса 2” к пункту, который возвращает данные. Ответ доставляется прикладной функцией на ПУ посылкой A_USER_DATA_CLASS 2.ind. Бит ACD, равный 1 (см. 5.1.2 ГОСТ Р МЭК 870-5-2), показывает ПУ, что данные класса 1, которые запрошены командой “Запрос пользовательских данных класса 1”, доступны КП.
При третьей процедуре прикладная функция на ПУ выдает запрос A_RD_DATA, передаваемый с помощью PDU C_RD (сервис канала посылка/подтверждение) на КП. Затем запрошенные данные опрашиваются командой “Запрос пользовательских данных класса 1”, передаваемой как M_PDU, и принимаются на ПУ как А_М_DАTA.ind.
6.3 Циклическая передача данных
Циклическая передача данных используется для выполнения непрерывного опроса текущих значений переменных величин процесса в системах телемеханики, работающих с балансными и небалансными процедурами передач. Эта процедура выполняется с низким приоритетом, что означает, что она может быть прервана запросом на связь при появлении событий.
6.3.1 Описание последовательности процедур (рисунок 11)
Рисунок 11 - Последовательная процедура - циклическая передача данных
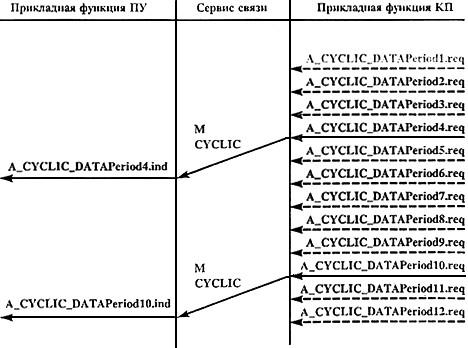
Примечание - CYCLIC_DATA может быть набором периодически опрашиваемых данных, передаваемых в независимом цикле.
Рисунок 11 - Последовательная процедура - циклическая передача данных
Пользовательский процесс на КП циклически записывает действительные значения переменных величин процесса в буферную память. Действительные значения из буферной памяти передаются на ПУ с циклическими интервалами, см. рисунок 11. Поступление данных на ПУ указывается сигналом A_CYCLIC_DATA.ind.
6.4 Сбор данных о событиях
На уровне пользователя события возникают спонтанно. Процедуры, выполняющие задачи оповещения удаленных станций о событиях, зависят от работы системы связи. Во всяком случае, местный процесс требует наличия буфера, чтобы сохранить события, которые могут возникать быстрее, чем происходит их пересылка на удаленную станцию.
В балансных системах непосредственная процедура передачи с КП событий с заданным приоритетом прерывает циклическую процедуру передачи с более низким приоритетом.
В небалансных системах процесс передачи на КП должен ждать запроса с ПУ.
6.4.1 Описание последовательности процедур (рисунок 12)
Рисунок 12 - Последовательная процедура - сбор данных о событиях
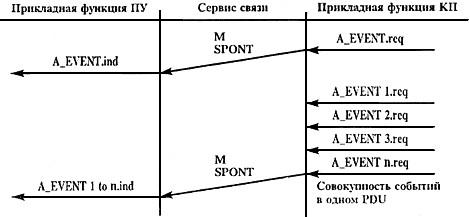
Рисунок 12 - Последовательная процедура - сбор данных о событиях
Инициализация сбора данных о событиях на ПУ в небалансных системах передачи происходит или периодически, или после запросов с КП, которые оповещают ПУ о появлении событий, когда идет опрос. В балансных системах передача информации о событиях производится процедурами посылка/подтверждение.
Если одно или несколько событий запоминаются на КП, то на ПУ эта информация передается как PDU M_SPONT и принимается пользователем как сигнал A_EVENT.ind (см. рисунок 12).
6.5 Сбор данных о событиях процедурой быстрой проверки (quick-cheсk)
Этот метод иногда используется, чтобы ускорить сбор данных о событиях в небалансных системах.
6.5.1 Описание последовательности процедур (рисунок 13)
Рисунок 13 - Последовательная процедура - сбор данных о событиях при помощи процедуры быстрого контроля
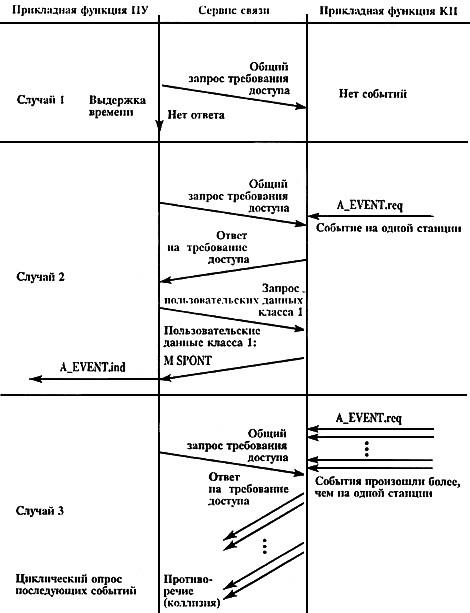
Рисунок 13 - Последовательная процедура - сбор данных о событиях при помощи процедуры быстрого контроля
ПУ посылает через периодические промежутки общие запросы, состоящие из PDU требований доступа, направленные ко всем КП. После передачи таких PDU возможны три результата, см. рисунок 13.
Случай 1. С момента последней передачи событий новые события не появились. В этом случае нет ответа на общий запрос и процедура завершается с выдержкой времени.
Случай 2. Событие появилось на одном из адресуемых КП. Этот КП инициирует сообщение A_EVENT.req через примитив сервиса связи. После приема запроса на требование доступа КП посылает на ПУ ответный PDU - требование доступа. Затем ПУ посылает на КП посылку PDU “Запрос пользовательских данных класса 1". В ответ КП посылает на ПУ информацию о событии в форме PDU “Пользовательские данные класса 1”. ПУ передает к прикладной функции примитива A_EVENT.ind.
Случай 3. События появились более чем на одной из адресуемых станций. В этом случае все станции, которые ждут передачи сообщений о событиях, посылают одновременно PDU - ответ на запрос требования доступа к ПУ, и кадры вступают в противоречие. Эта ситуация обнаруживается на ПУ. После передачи всех кадров ПУ начинает процедуру опроса события, как описано в 6.2.1.
6.6 Общий опрос. Опрос КП
Функция опроса КП используется для обновления данных ПУ после процедуры внутренней инициализации станции или, если ПУ обнаруживает потерю информации. Функция общего опроса с ПУ требует передачи с КП действительных значений величин всех переменных процесса.
После приема команды опроса КП передает запрошенную информацию. Количество требуемой информации по прикладным функциям обычно известно на ПУ и КП. Общее количество передаваемой запрошенной информации может быть выбрано ПУ. В этом случае окончание опроса КП определяется после получения всей запрошенной информации. Если требуемое количество запрашиваемой информации не определяется на ПУ, то КП определяет окончание процедуры запроса после окончания сервиса запроса (необязательно).
Процедура опроса КП может быть прервана событиями, случайно возникающими на КП. Однако необходимо позаботиться, чтобы избежать любой путаницы, которая может произойти с принятой запрошенной информацией, которая из-за появления событий станет устаревшей.
6.6.1 Описание последовательности процедур (рисунок 14)
Рисунок 14 - Последовательная процедура - процедура опроса подстанций
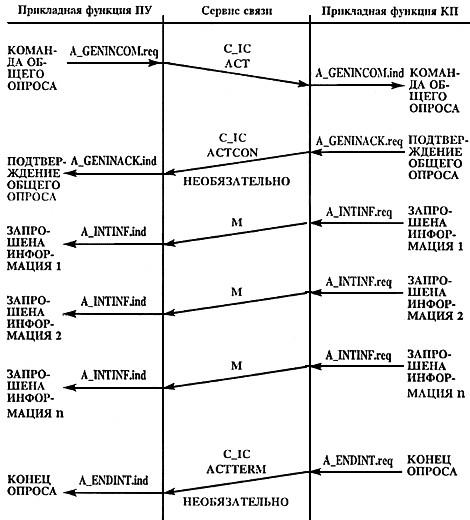
Рисунок 14 - Последовательная процедура - процедура опроса подстанций
Процесс пользователя на ПУ посылает команду запроса в виде примитива A_GENINCOM.req на сервис связи; последний передает команду PDU C_IC ACT (команда запроса PDU). Эту команду получает процесс пользователя на КП в виде примитива A_GENINCOM.ind.
После начала процедуры запроса процесса пользователя на КП передается подтверждение запроса сигналом PDU C_IC ACTCON, который инициируется примитивом A_GENINACK.req. Это PDU поступает на прикладную функцию на ПУ в виде примитива A_GENINACK.ind.
Использование этого сервиса необязательно.
Прикладная функция на КП передает запрошенную информацию как PDU М (контрольная информация). Передача инициируется примитивом A_INTINF.req. Запрошенная информация поступает к прикладной функции как A_INTINF.ind.
После передачи последней запрошенной информации конец процедуры запроса может быть показан прикладной функции на КП. Окончание передачи запрошенной информации сообщается процессу пользователя на ПУ как примитив A_ENDINT.req при помощи посылок PDU C_IC ACTTERM и A_ENDINT.ind. Применение этого сервиса необязательно.
6.7 Синхронизация по времени
Время на КП должно быть синхронизировано с временем на ПУ, чтобы иметь правильную хронологическую последовательность событий или сообщений, которые передаются на ПУ или регистрируются на месте. В начале время синхронизируется ПУ после инициализации (запуска) системы, а затем синхронизация поддерживается периодически передачей команды PDU C_CS ACT (команда синхронизации по времени).
Команда PDU C_CS ACT содержит полное текущее время, т.е. дату и информацию о времени с требуемым разрешением по времени на момент передачи первого бита PDU C_CS ACT. Информация о времени должна быть скорректирована на КП, когда будет получен PDU, или на ПУ до посылки PDU. Величина корректировки времени определяется как сумма задержки (запаздывания) передачи и произведения длины кадра синхронизации на скорость передачи. Выполнение операции синхронизации на КП зависит от специфических требований процесса и не является объектом стандартизации. После выполнения синхронизации ПУ генерирует сигнал PDU С_СI ACTCON, содержащий информацию о местном времени до синхронизации минус величину коррекции времени. Это сообщение передается после любого запомненного PDU с отметкой времени, который ожидает передачу. События, возникшие после синхронизации по времени, передаются после посылки PDU C_CS ACTCON.
КП ожидает получение команды синхронизации в течение заданного заранее промежутка времени. Если команда на синхронизацию не появится за промежуток времени, который зависит от точности часов и допустимых отклонений времени, то в этом случае КП снабжает все объекты информации меткой, показывающей, что точность информации о времени сомнительна. Метка о возможной неточности информации о времени также ставится на объектах информации после повторного включения аппаратуры или инициализации КП до получения правильной команды PDU C_CS ACT (команда синхронизации). События с отметкой времени, возникшие после получения команды PDU C_CS ACT, передаются без метки.
Команда C_CS ACT (команда синхронизации) может быть послана как сервис ПОСЫЛКА/БЕЗ ОТВЕТА (возможно циркулярно к более, чем одному КП) или как сервис ПОСЫЛКА/ПОДТВЕРЖДЕНИЕ на уровне канала.
6.7.1 Описание последовательности процедур (рисунок 15)
Рисунок 15 - Последовательная процедура - процедура синхронизации по времени, включенная в процедуру передачи событий с отметкой времени
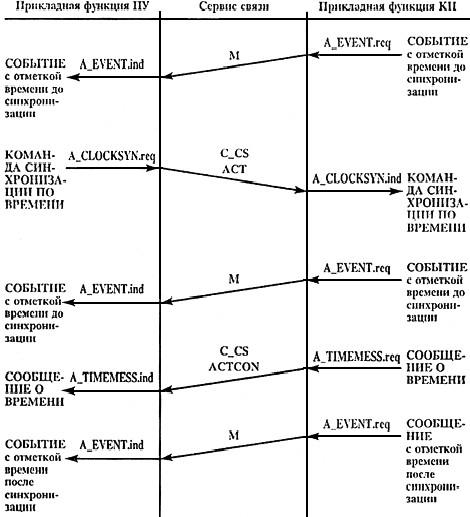
Рисунок 15 - Последовательная процедура - процедура синхронизации по времени, включенная в процедуру передачи событий с отметкой времени
Пользовательский процесс на ПУ посылает команды синхронизации по времени в виде примитива CLOCKSYN.req к сервису связи, сервис связи передает сигнал PDU C_CS ACT, содержащий значение времени; он выдается пользовательскому процессу на КП как примитив A_CLOCKSYN.ind.
После окончания операции синхронизации пользовательский процесс на ПУ вырабатывает сообщение о времени, которое передается как сигнал PDU C_CS ACTCON, инициируемый примитивом А_ТIMEMESS.req. Этот PDU содержит достоверную информацию о времени в момент перед синхронизацией, за вычетом значения величины коррекции по времени, которая сообщена прикладной функции на ПУ как примитив A_TIMEMESS.ind.
Примечание - Динамическая процедура измерения значения величины запаздывания (задержки) передачи описана в 6.1.3.
6.8 Передача команд
Команды используются в системах телемеханики для изменения состояния оперативного оборудования. Таким образом, команды используются для управления контролируемым процессом в нужном направлении.
Команды могут инициироваться оператором или автоматическими управляющими процедурами на ПУ. Меры предосторожности против неразрешенного доступа или нежелательных действий зависят от системы или процесса. Типовые части оперативного оборудования или задачи процесса включают в себя:
- электрические контакторы, разъединители;
- выключатели;
- пуск-останов местного процесса управления с пункта управления процессом;
- выполнение шага в местной управляющей последовательности;
- установление точки, пределы для сигналов аварий, особые параметры и т.п.
Для передачи команд существуют две стандартные процедуры, а именно:
1) прямая (непосредственная) команда;
2) команды выбора и исполнения.
Непосредственная команда используется на КП для прямых операций управления процессами на удаленном КП. Прикладная функция на КП проверяется по условиям безопасности - допустимость и обоснованность принятого командного сообщения - и, если проверка положительна, операция выполняется.
Команды выбора и исполнения используются на ПУ для подготовки заданной управляющей операции на удаленном КП, проверки, что управляющая операция подготовлена правильно, и затем для выполнения команды.
Проверка выполняется оператором или пользовательской процедурой. КП не начинает операцию управления, пока не получит правильный сигнал исполнения.
6.8.1 Описание последовательности процедур (рисунок 16)
Рисунок 16 - Последовательная процедура - процедура передачи команд
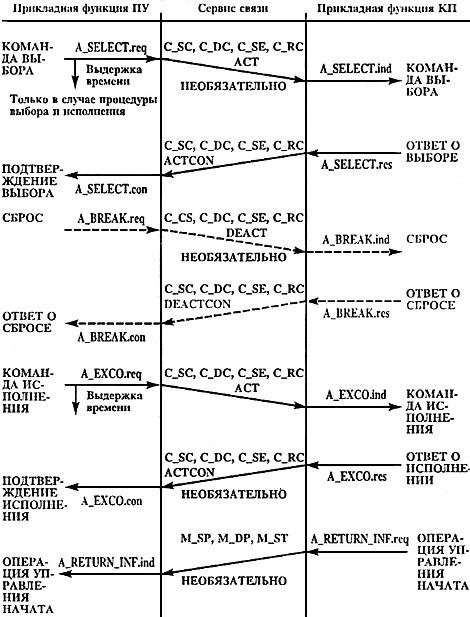
Рисунок 16 - Последовательная процедура - процедура передачи команд, лист 1
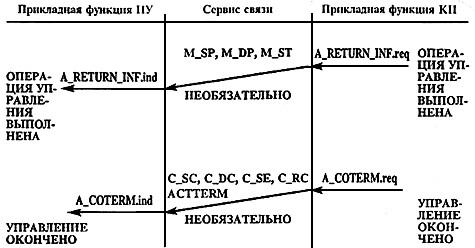
Рисунок 16, лист 2
Последовательность процедур команд выбора и исполнения и прямой (непосредственный) команды показана на рисунке 16 и описана ниже.
В случае процедур выбора и исполнения пользовательский процесс ПУ посылает примитив A_SELECT.req к сервису связи; сервис связи передает команду PDU, содержащую С ACT (команда выбора), которая сообщается процессу пользователя на КП в виде примитива A_SELECT.ind. Если пользовательский процесс на КП готов к приему команды, что сообщается “Select command”, то образуется “Select response”, который возвращается к сервису связи как примитив A_SELECT.res. Эта команда ответа передается как сигнал PDU C_ACTCON и вырабатывает подтверждение “Select confirmation” в виде примитива A_SELECT.con. Такая процедура используется только в случае команд выбора и исполнения, которые не прерываются и контролируются посредством задания выдержки времени.
Процедура выбора прекращается при помощи команды “Break off command”, передаваемой на КП сигналом С DEACT и завершаемой ответом С DEACTCON.
При необходимости команда “Execute command” выдается к сервису связи примитивом A_EXCO.req. Эта команда передается как PDU С ACT и поступает к пользовательскому процессу на КП как примитив A_EXCO.ind. Ответ “Execution response” может быть возвращен на ПУ как PDU С ACTCON; там вырабатывается положительное или отрицательное подтверждение о том, что готовится определенное управляющее действие. Эта процедура не прерываема и контролируется посредством задания выдержки времени.
При процедуре непосредственной (прямой) команды пользовательский процесс на КП проверяет, не заблокирован ли выход адресуемой команды, т.е. готов ли выход к выполнению команды. Если проверка показала, что все в порядке, пользовательский процесс на КП выдает команду на исполнительное устройство, а затем может возвратить положительное подтверждение PDU С ACTCON. В противном случае ответом будет отрицательный сигнал PDU С ACTCON.
Когда команда поступит к процессу, адресуемое оперативное оборудование изменит свое состояние. Исполнение этого изменения контролируется и показывается на ПУ при помощи возврата информации. В случае специальной команды, такой как двухпозиционная команда, управляющая медленно действующими разъединителями, начало изменения положения (состояния), когда ранее бывшее состояние “включено” или “выключено” уже нарушено, это может быть (необязательно) показано на ПУ соответствующими PDU M (Return information: “Control operation commenced”). Когда исполнение команды завершено достижением нового определенного положения, процесс пользователя на КП покажет это соответствующей посылкой на ПУ PDU M (Return information: “Control operation complete”), см. рисунок 16.
Это может заканчиваться посылкой PDU С ACTTERM, которая показывает, что операция управления окончена (необязательно).
6.9 Передача интегральных сумм (телесчет)
Телесчет определяется как “передача значений измеряемых величин, проинтегрированных по заданному параметру”, например, по времени, и использующих технику связи. Интегрирование может осуществляться до или после передачи. Если интегрирование осуществляется до передачи, то используется термин “передача интегральных значений”.
Интегральное значение - это величина, проинтегрированная за определенный период времени. Текущее время и периодический временной интервал последовательного получения интегральных значений являются параметрами системы. Некоторые системы используют периодические команды для начала опроса интегральных значений на ПУ. В других системах периодическая активация вызывается местным источником времени (часами) на КП. Синхронизация по времени поддерживается или системой телемеханики (см. 6.7) или внешними синхронизирующими процедурами, например, приемом национального (государственного) или международного радиосигнала точного времени.
Для получения информации от счетчиков применяются два различных метода:
1) получение интегральных значений
КП периодически в определенное время запоминает интегральное значение в буферной памяти и передает запомненные значения на ПУ. Счетчики продолжают работать, не сбрасываясь в исходное состояние. В этом случае значение приращения за период рассчитывается на ПУ. Приращение - это разность между двумя последовательно переданными значениями;
2) получение информации с приращениями
КП периодически в определенное время запоминает интегральное значение в буферной памяти и сбрасывает интегральные значения в ноль, затем запомненные значения передаются на ПУ.
6.9.1 Описание последовательности процедур (рисунок 17)
Рисунок 17 - Последовательная процедура - сбор данных об интегральных значениях
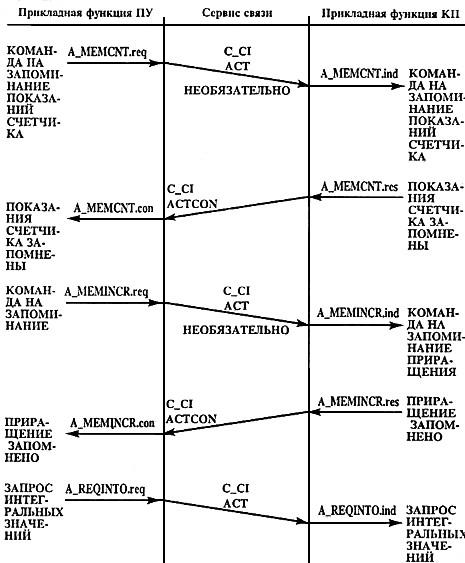
Рисунок 17 - Последовательная процедура - сбор данных об интегральных значениях, лист 1
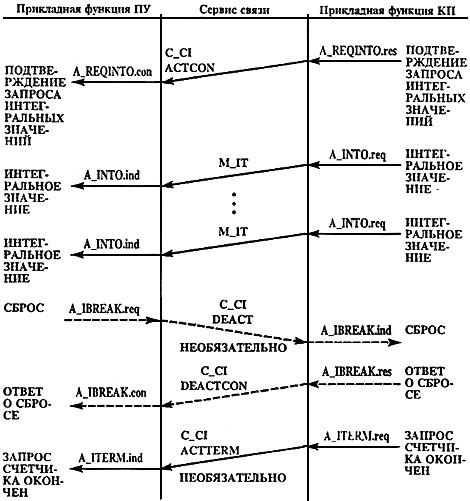
Рисунок 17, лист 2
ПУ передает (необязательно) периодически в определенное время команды PDU C_CI ACT (или Memorise counter command или Memorise increment command) на КП. Обе команды вызывают передачу интегральных значений в буферную память. В случае команды Memorise increment command интегральное значение переставляется дополнительно в ноль. В другом случае активация этой процедуры вызывается местным источником времени на КП.
После исполнения этих процедур запомненные значения могут быть запрошены или необязательной посылкой C_CI ACT (Reguest integral totals), получая в ответ сигнал C_CI ACTCON, или запомненные значения могут передаваться на ПУ как события на объекте. В этом случае запомненные значения (PDU М_IT) могут быть получены ПУ как события (см. 6.4).
Передача интегральных значений может быть остановлена сигналом примитива A__IBREAK.req, который передается на КП при помощи C_CI DEACT с ответом C_CI DEACTCON.
В случае ЗАПРОСА интегральных значений (integral totals) за ним следует заключительная посылка PDU C_CI ACTTERM, которая показывает, что операция управления окончена (также необязательно).
6.10 Загрузка параметров
Загрузка параметров используется в системах при измерении на КП заранее определенных (установленных) параметров, например значений порогов или пределов измеряемых величин. Обычно загрузка параметра выполняется в два процедурных шага:
1) один или более чем один параметр загружается в КП командой параметра. На КП эти параметры запоминаются и еще не активны;
2) на втором шаге предварительно загруженные параметры активизируются при помощи команды работы параметра.
Эти два шага (этапа) обязательны, если определенное число параметров необходимо активировать точно в одно время. При загрузке одного параметра активацию можно объединить с загрузкой, т.е. эти процедуры можно выполнить в один шаг (этап).
6.10.1 Описание последовательности процедур (рисунок 18)
Рисунок 18 - Последовательная процедура - загрузка параметра
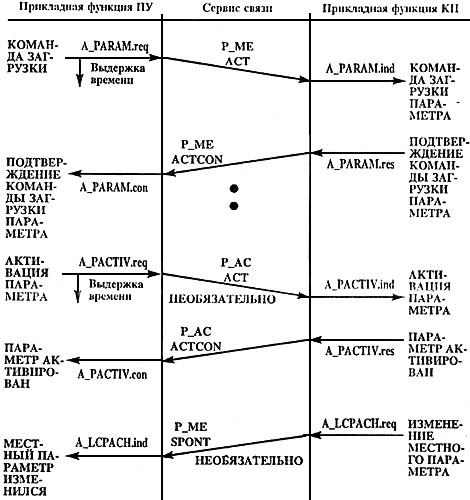
Рисунок 18 - Последовательная процедура - загрузка параметра
Прикладная функция на ПУ посылает сигнал примитива A_PARAM.req на сервис связи; последний передает сигнал PDU, содержащий команду Р_МЕ ACT (Parameter command), которая поступает к прикладной функции на КП как примитив A_PARAM.ind. Прикладная функция на КП вырабатывает команду Parameter command ACK, которая возвращается к сервису связи как примитив A_PARAM.res. Эта команда запроса передается как PDU P_ME ACTCON и вырабатывает подтверждение примитив A_PARAM.con на ПУ.
Если ранее загруженные параметры активируются по отдельности, то передается команда активации параметра Parameter activation command посредством примитива A_PACTIV.req на сервис связи. Последняя передается как PDU P_AC ACT и поступает на КП к функции пользовательского процесса как примитив А_РАСTIV.ind. Сигнал подтверждения может возвратиться на КП как Р_АС ACTCON, чтобы подтвердить, что ранее загруженные параметры уже работают.
В случае местного изменения параметра КП может передавать на ПУ сопутствующий PDU P_ME SPONT.
6.11 Тестовая процедура
Тестовая процедура используется для проверки полной петли от ПУ до КП и затем обратно к ПУ, включая соответствующие функции пользователя.
6.11.1. Описание последовательности процедур (рисунок 19)
Рисунок 19 - Последовательная процедура - тестовая процедура
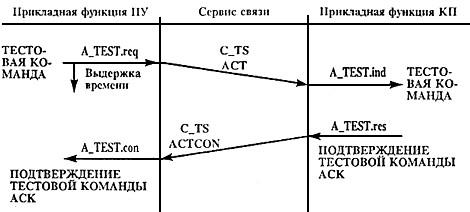
Рисунок 19 - Последовательная процедура - тестовая процедура
Прикладная функция ПУ посылает сигнал примитива A_TEST.req к сервису связи, который передает команду PDU C_TS ACT (Test command), поступающую к прикладной функции КП как примитив A_TEST.ind. Прикладная функция на КП вырабатывает команду Test command ACK, которая возвращается на сервис связи как примитив A_TEST.req. Этот ответ передается как PDU C_TS ACTCON, вырабатывая на ПУ подтверждение в виде примитива A_TEST.con.
ПУ проверяет отраженный сигнал PDU C_TS. В случае получения такого же PDU за ограниченное время тест считается положительным.
6.12 Пересылка файлов
Если размер индивидуального объекта информации превышает заданную максимальную длину ASDU в данной системе телемеханики, то требуется функция пересылки файлов. В этом случае объект информации передается к месту назначения в форме сегментов.
В системах телемеханики файлы пересылаются от КП к ПУ и наоборот. События, которые вызывают обширную регистрацию данных на КП (например, регистрация данных об ошибках), передаются на КП последовательно. Типы и количество таких файлов, регистрируемых на КП, должны быть сообщены на ПУ при помощи PDU Directory.
Процедуры загрузки для списков параметров или программ от ПУ к КП управляются с ПУ и поэтому не требуют передачи директив.
Структуры файлов одинаковы в обоих направлениях (рисунок 20). Файлы разделяются на секции, секции разделяются на сегменты, которые передаются в последовательных PDU. Индивидуальное ошибочное событие, фиксируемое регистром ошибок, может быть представлено как секция файла, а несколько величин могут быть собраны в отдельные сегменты файла.
Рисунок 20 - Общее построение файла
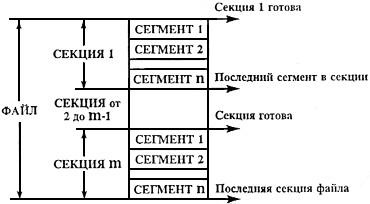
Рисунок 20 - Общее построение файла
Несмотря на одинаковые структуры файлов в обоих направлениях передачи, процедуры передачи различны и поэтому будут описаны отдельно.
6.12.1 Пересылка файла в направлении ПУ
Пересылка файлов от КП в основном используется для сообщения ПУ о возникших событиях, которые повлекли за собой регистрацию большого количества данных. Количество файлов, время регистрации и типы событий (например, мгновенные значения в момент срабатывания устройств защиты) должны быть переданы ПУ при помощи сообщения PDU Directory. ПУ решает, должен ли быть переслан файл и какой именно. Запись успешно переданных файлов стирается на КП, чтобы освободить буфер для создания новых файлов.
6.12.1.1 Описание последовательности процедур (рисунок 21)
Рисунок 21 - Последовательная процедура - передача файла (в направлении ПУ)
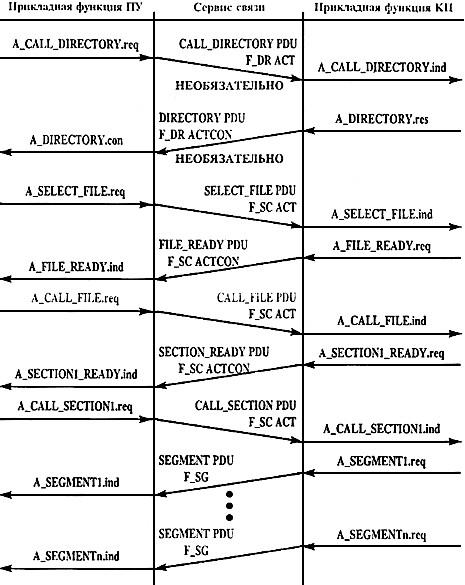
Рисунок 21 - Последовательная процедура - передача файла (в направлении ПУ), лист 1
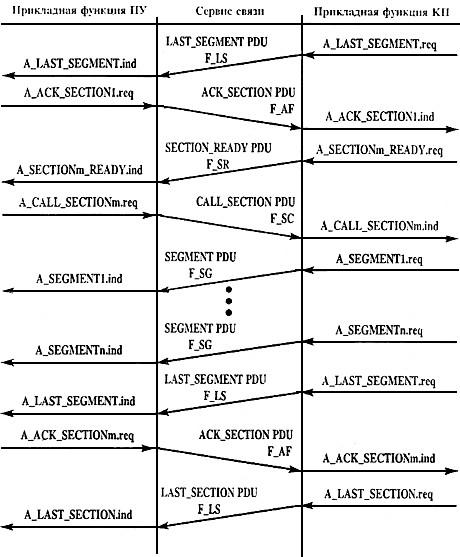
Рисунок 21, лист 2

Рисунок 21, лист 3
После создания нового файла на КП (при возникновении событий) на ПУ может быть самопроизвольно дослано сообщение PDU Directory. PDU Directory содержит количество, тип и значения файлов, зарегистрированных, но еще не пересланных на ПУ.
Кроме того, ПУ может в любое время получать при помощи запроса A_CALL_DIRECTORY количество и типы файлов, зарегистрированных на КП.
Если ПУ готов получить файл, он посылает на КП команду PDU SELECT_FILE. КП предлагает передать выбранный файл и показывает ПУ при помощи PDU FILE_READY это состояние.
ПУ запрашивает выбранный файл при помощи посылки PDU CALL_FILE. КП в свою очередь показывает при помощи посылки PDU SECTION_READY, что первая секция файла готова к передаче.
ПУ запрашивает первую секцию при помощи посылки PDU CALL_SECTION (положительного) или отвергает ее при помощи посылки PDU CALL_SECTION (отрицательного). В случае отрицательного ответа КП предлагает для передачи вторую (следующую) секцию при помощи посылки PDU SECTION_READY. В положительном случае КП передает последовательно сегменты от 1 до n при помощи сигнала PDU SEGMENT. После передачи последнего сегмента КП посылает на ПУ PDU LAST_SEGMENT. ПУ подтверждает получение соответствующей секции при помощи сигнала PDU ACK_SECTION положительного или отрицательного. В случае отрицательного подтверждения (квитанция) эта же секция предлагается снова при помощи посылки PDU SECTION_READY; при положительном подтверждении (квитанции) предлагается следующая секция при помощи посылки PDU SECTION_READY. Эта процедура повторяется при передаче последующих секций файла.
После передачи последней секции сигнал PDU LAST_SECTION показывает окончание передачи файла. ПУ подтверждает при помощи посылки PDU ACK_FILE правильное получение всего файла. КП может теперь стереть файл на буферной памяти и из директивы. Затем на ПУ может быть послано действительное состояние директивы при помощи сообщения PDU Directory.
6.12.2 Пересылка файлов в направлении КП
Пересылка файлов в направлении КП используется в основном для загрузки списков параметров и программ. ПУ ответственен за расположение типов, количества и размеров пересылаемых файлов данных. Поэтому пересылка директив не требуется.
6.12.2.1 Описание последовательности процедур (рисунок 22)
Рисунок 22 - Последовательная процедура - передача файла (в направлении КП)
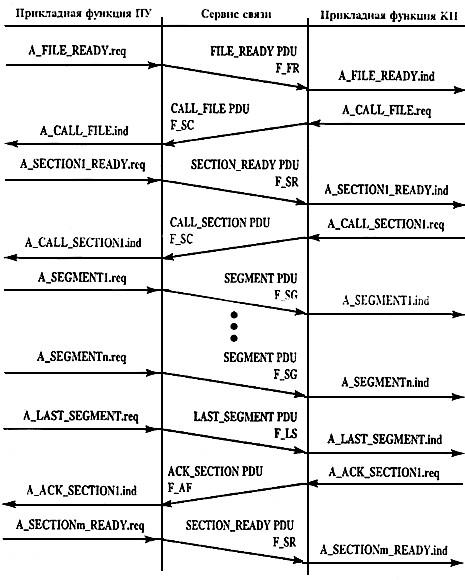
Рисунок 22 - Последовательная процедура - передача файла (в направлении КП), лист 1
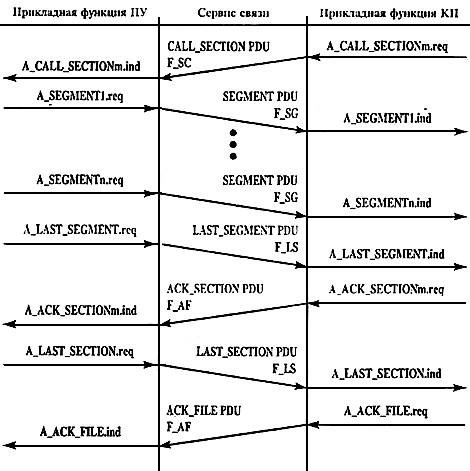
Рисунок 22, лист 2
ПУ при помощи сообщения PDU FILE_READY извещает о намерении переслать файл на КП. Как только КП готов принять файл, он передает на ПУ сигнал PDU CALL_FILE. ПУ тогда извещает при помощи посылки PDU SECTION_READY, что секция подготовлена. Если КП готов получить ее, то он передает сигнал PDU CALL_SECTION.
ПУ при помощи посылки PDU SEGMENTS передает затем сегменты секции. Последний сегмент обозначается как PDU LAST_SEGMENT. После правильного приема сегментов КП передает сигнал PDU ACK_SECTION.
ПУ последовательно передает следующие секции, как описано выше. После передачи последней секции ПУ передает сигнал PDU LAST_SECTION, что обозначает конец файла. Если КП получает весь файл правильно, это подтверждается посредством посылки PDU ACK_FILE.
6.13 Получение (определение) запаздывания передачи
Синхронизация часов на КП, включающая корректировку времени, описана в 6.7. Значение коррекции времени определяется суммой задержки передачи и внутренней задержки в аппаратуре. Последняя зависит от особых требований процесса и не является объектом стандартизации. Задержка передачи - это величина, которая может быть независимо определена параметрически или динамически по инициативе ПУ. Нижеследующая процедура показывает динамическое определение задержки передачи.
6.13.1 Описание последовательности процедур (рисунок 23)
Рисунок 23 - Последовательная процедура - определение запаздывания передачи
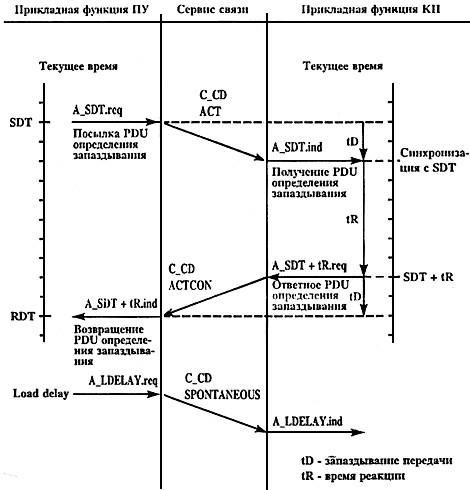
Рисунок 23 - Последовательная процедура - определение запаздывания передачи
PDU C_CD ACT(PDU посылки определения запаздывания) содержит значение времени в момент, когда передается первый бит PDU C_CD ACT (время SDT). КП синхронизирует свои внутренние часы [или дополнительные (вспомогательные) часы] после получения этого значения времени. Таким образом время на КП синхронизировано с временем SDT. КП возвращает обратно сообщение PDU C_CD ACTСON, которое содержит значение часов КП (![]() ) в момент, когда передается первый бит кадров PDU C_CD ACTCON. ПУ получает ответное PDU в момент
) в момент, когда передается первый бит кадров PDU C_CD ACTCON. ПУ получает ответное PDU в момент ![]() . Таким образом, задержка передачи
. Таким образом, задержка передачи ![]() может быть вычислена на ПУ по формуле
может быть вычислена на ПУ по формуле
![]() .
.
Значение определенной задержки передачи передается на КП (необязательно) как С_CD SPONTANEOUS и можeт быть использовано для корректировки синхронизации по времени, как описано в 6.7.
Примечание - Описанный метод предусматривает одинаковые скорости передачи в направлении команды и контроля.