ГОСТ Р МЭК 870-4-93
Группа П77
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 4
Технические требования
Telecontrol equipment and systems.
Part 4. Performance requirements
ОКП 42 3200
Дата введения 1995-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1 РАЗРАБОТАН И ВНЕСЕН Министерством топлива и энергетики Российской Федерации
РАЗРАБОТЧИКИ
Ц.Е.Геронимус (руководитель темы), К.Г.Митюшкин
2 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 30.12.93 N 308
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 870-4-90 "Устройства и системы телемеханики. Часть 4. Технические требования"
3 ВВЕДЕН ВПЕРВЫЕ
4 ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение отечественного НТД, на который дана ссылка | Обозначение соответствующего международного стандарта | Пункт, в котором приведена ссылка |
ГОСТ Р МЭК 870-1-1-93 | МЭК 870-1-1 | 1 |
- | МЭК 870-5-1* | 3.5; 3.5.1 |
- | Международный электротехнический словарь (МЭС) МЭК 50 (371) | 3.5; 3.5.1; 3.6; 3.6.1; 3.6.3; А5.2 |
___________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
ВВОДНАЯ ЧАСТЬ
ВВОДНАЯ ЧАСТЬ
Настоящий стандарт распространяется на системы телемеханики, обеспечивающие надежные и безопасные контроль и управление территориально распределенными процессами и рассматривает характеристики этих систем, согласующиеся с их функцией.
Стандарт устанавливает технические требования к системам телемеханики, обеспечивающие выполнение их основных функций.
Такие параметры системы, как надежность, временные параметры и другие влияют на характеристики всей системы. В процессе нормальной работы эти параметры и их влияние на характеристики системы телемеханики практически незаметны. И только при исключительных обстоятельствах (при определении повреждений или необходимости расширения системы телемеханики) заметно реальное значение этих параметров. Характеристики системы телемеханики, особенно при экстремальных (исключительных) условиях, соответствуют этим параметрам при проектировании, разработке и изготовлении аппаратуры.
При установлении технических требований для специальных систем телемеханики следует пользоваться стандартами, соответствующими специальным условиям применения. Должно быть найдено равновесие между специальными требованиями, с одной стороны, и техническими и финансовыми возможностями, с другой.
1 ОБЛАСТЬ РАСПРОСТРАНЕНИЯ
Настоящий стандарт распространяется на устройства и системы телемеханики с последовательной кодированной передачей данных для контроля и управления территориально распределенными процессами. Область применения стандарта охватывает системы телемеханики в узком смысле, как показано на черт.2 ГОСТ Р МЭК 870-1-1.
Требования пп.3.1.1, 3.1.2, 3.2, 3.3.1, 3.3.2, 3.5.1, 3.6.1.1, 3.6.1.2, 3.6.2, 3.6.2.1, 3.7, 3.7.1, 3.7.2, 5.1, 5.2 настоящего стандарта являются обязательными.
2 ОБЪЕКТ СТАНДАРТИЗАЦИИ
Настоящий стандарт устанавливает характеристики, которые определяют работу систем телемеханики и связаны с функциями пользователя и обработки данных.
Стандарт устанавливает ряд правил, которые можно использовать для оценки и определения технических требований к системам телемеханики.
Настоящий стандарт может служить общим руководством для проектировщиков, поставщиков или изготовителей систем телемеханики. Проектировщик может найти существенную помощь в определении требований к специальным системам телемеханики. Кроме того, обеспечивается возможность сравнения продукции различных поставщиков. Изготовитель найдет в нем руководящие указания по разработке (изготовлению) систем телемеханики и основу для классификации характеристик систем телемеханики.
Стандарт включает приложения А и В, содержащие дополнительную информацию и рекомендации.
Основная часть стандарта посвящена рассмотрению различных характеристик, определяющих рабочие параметры. Краткое описание каждого параметра сопровождается перечнем необходимых технических требований и, при необходимости, разбивкой рабочих параметров по классам. Классы служат как для установления требований к системам телемеханики для конкретных применений, так и для оценки характеристик различных систем телемеханики.
Для каждого применения системы телемеханики выбирают соответствующие классы, являющиеся предметом договоренности между изготовителем и пользователем.
3 КЛАССИФИКАЦИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ
В данном разделе рассматриваются параметры, влияющие на характеристики системы телемеханики. Соответствующие требования и, при возможности, классы характеристик определены для каждого параметра.
На классы делят обычно характеристики отдельных частей системы. Характеристики всей системы должны определяться, исходя из характеристик всех частей системы телемеханики (в узком смысле слова), исключая аппаратуру процесса и оператора. Однако некоторые параметры, такие как безотказность и готовность могут использоваться как критерии характеристик отдельных частей аппаратуры. Компонентами всей системы являются, например:
- контролируемые пункты;
- узлы;
- линии передачи;
- центральный процессор;
- интерфейс человек-машина.
Требования к специальным системам телемеханики зависят от конкретного применения и являются предметом договоренности между изготовителем и пользователем.
3.1. Безотказность
Безотказность определяется как способность аппаратуры или системы выполнять предназначенные функции при заданных условиях за определенный период времени. Это вероятностная оценка, основанная на данных об отказах и длительности рабочего времени.
Безотказность систем телемеханики нормируется "средним временем между отказами" в часах ![]() (MTBF)* и может быть рассчитана из значений надежности отдельных компонентов системы. Безотказность системы зависит от следующих факторов:
(MTBF)* и может быть рассчитана из значений надежности отдельных компонентов системы. Безотказность системы зависит от следующих факторов:
- надежности аппаратуры, входящей в систему, и надежности математического обеспечения;
- конфигурации системы.
___________
* "mean time between failures".
Меры, которые могут повысить безотказность, описаны в приложении А, п.A.I.
3.1.1 Требования к безотказности
Безотказность всей системы и отдельных частей системы телемеханики изготовитель рассчитывает по данным о надежности отдельных компонентов и подтверждает в реальной эксплуатации за заданный период испытаний. Начало и продолжительность периода испытаний должны быть согласованы между изготовителем и пользователем, но из периода испытаний должен быть исключен период ранних отказов.
Изготовитель аппаратуры должен предоставлять по требованию пользователя данные о надежности всех элементов, узлов и блоков, которые при отказе могут вызвать потерю их работоспособности или неправильное их функционирование.
Виды отказов и влияние отказов на характеристики системы должны быть проанализированы изготовителем, а результаты анализа предоставляются пользователю по его требованию.
3.1.2 Классы безотказности
Значения безотказности, приведенные в табл.1 для соответствующих классов, относятся к надежности системы телемеханики.
Таблица 1
Класс безотказности |
|
R1 |
|
R2 |
|
R3 |
|
3.2. Готовность
Готовность системы телемеханики характеризуется способностью выполнять требуемые функции в любой момент времени.
Готовность - это вероятностная величина, которая характеризует работу системы телемеханики в данный момент в отличие от безотказности, характеризующей работу за заданный период времени.
Готовность системы телемеханики выражается коэффициентом готовности ![]() (А), который рассчитывают по формуле
(А), который рассчитывают по формуле
![]() . (1)
. (1)
В тех случаях, когда простои из-за профилактического обслуживания уменьшают время работы системы телемеханики, простои в формуле (1) являются суммой значений времени, затрачиваемого на ремонт и профилактику.
При разработке аппаратуры и для определения коэффициента готовности узлов и подсистем используют формулу (2), ![]() и
и ![]() (MTTR)* определены соответственно в пп.3.1 и 3.3
(MTTR)* определены соответственно в пп.3.1 и 3.3
__________
* "mean time to restoration";
![]() , (2)
, (2)
где ![]() - расчетное значение коэффициента готовности.
- расчетное значение коэффициента готовности.
Это уравнение устанавливает связь между величинами, приведенными в табл.1-4, поэтому они не могут произвольно комбинироваться.
Таблица 2
Класс готовности | Коэффициент готовности |
А1 |
|
А2 |
|
A3 |
|
Таблица 3
Класс ремонтопригодности |
|
M1 |
|
М2 |
|
М3 |
|
М4 |
|
Таблица 4
Класс времени ремонта |
|
RT1 |
|
RT2 |
|
RT3 |
|
RT4 |
|
Меры, применяемые для улучшения готовности систем телемеханики, приведены в приложении А, п.А.2.
3.2.1 Требования к готовности
Класс или классы готовности систем или подсистем телемеханики устанавливают по договоренности между изготовителем и пользователем.
Готовность систем или устройств телемеханики, находящихся в эксплуатации, рассчитывают по формуле (1) на основании статистических данных времени работы и времени обслуживания аппаратуры. Статистические данные следует регистрировать не менее 6 мес для систем телемеханики и 12 мес для устройств телемеханики, начиная с момента окончания периода ранних отказов.
Для еще не установленного оборудования следует использовать формулу (2) для расчета готовности как всей системы телемеханики, так и ее основных частей, таких как аппаратура пункта управления (ПУ), контролируемого пункта (КП) и т.п., а также периферийных ЭВМ. Результаты расчета должны быть сверены с результатами, полученными при эксплуатации оборудования в течение времени, необходимого для исключения периода ранних отказов.
Влияние выхода из строя отдельных элементов или функций системы на готовность всей системы телемеханики, а также планово-предупредительного обслуживания должно быть согласовано между изготовителем и пользователем.
3.2.2. Классы готовности
Приведенные в табл.2 классы готовности относятся к готовности системы.
3.3. Ремонтопригодность
Ремонтопригодность - это способность системы или устройства телемеханики при заданных условиях эксплуатации после обнаружения отказа быть восстановленной до полной работоспособности и поддерживать нормальную работу.
Ремонтопригодность, кроме влияния условий эксплуатации, зависит, в основном, от правильного обслуживания, и, следовательно, от расположения оборудования и предусматриваемых диагностических средств.
Ремонтопригодность выражается через "среднее время восстановления" в часах ![]() (MTTR), получаемое как сумма следующих составляющих:
(MTTR), получаемое как сумма следующих составляющих:
- организационное время: промежуток времени между обнаружением отказа и уведомлением службы эксплуатации (ремонта);
- транспортное время: промежуток времени между уведомлением службы эксплуатации (ремонта) и прибытием на место персонала с необходимым оборудованием;
- среднее время ремонта ![]() (MRT)*: время, требуемое обученному ремонтному персоналу, обеспеченному запасными частями и необходимым испытательным оборудованием, на обнаружение и устранение отказа, включая повторную проверку устройства телемеханики.
(MRT)*: время, требуемое обученному ремонтному персоналу, обеспеченному запасными частями и необходимым испытательным оборудованием, на обнаружение и устранение отказа, включая повторную проверку устройства телемеханики.
___________
* "mean repair time".![]() , как определено выше, без организационного времени, относится к системам телемеханики, обслуживаемым изготовителем. Для систем телемеханики, обслуживаемых пользователем, от изготовителя зависит только время ремонта. Организационное и транспортное время зависят от организации эксплуатации у пользователя;
, как определено выше, без организационного времени, относится к системам телемеханики, обслуживаемым изготовителем. Для систем телемеханики, обслуживаемых пользователем, от изготовителя зависит только время ремонта. Организационное и транспортное время зависят от организации эксплуатации у пользователя;
Требования к обслуживанию систем телемеханики должны учитываться с самого начала разработки и проектирования, и важно, чтобы они определялись раньше, чем технические требования на оборудование.
Меры, которые могут улучшить эксплуатационную надежность и соответственно ремонтопригодность устройств, описаны в приложении А, п.A3. Обычно данные по ![]() дает только изготовитель.
дает только изготовитель.
3.3.1 Требования к ремонтопригодности
Устройства, выполненные в соответствии с настоящим стандартом, должны быть приспособлены к ремонту и обслуживанию в условиях эксплуатации обученным персоналом при наличии сервисного оборудования.
Класс или классы ремонтопригодности системы и подсистем телемеханики устанавливают по договоренности между изготовителем и пользователем.
Значения ![]() , установленные изготовителем, должны основываться на статистических данных эксплуатации.
, установленные изготовителем, должны основываться на статистических данных эксплуатации.
Изготовитель должен по запросу обеспечить эксплуатационный персонал запасными деталями в количестве, необходимом для данного класса, и перечнем необходимой испытательной аппаратуры. Количество запасных частей (деталей) зависит от времени, необходимого для восстановления отказавшей детали (в условиях эксплуатации и/или на ремонтном предприятии) и возвращения ее для эксплуатации.
3.3.2 Классы ремонтопригодности
Чтобы различить среднее время восстановления (![]() ) и среднее время ремонта (
) и среднее время ремонта (![]() ), предусмотрены разные классы, установленные в табл.3 и 4.
), предусмотрены разные классы, установленные в табл.3 и 4.
3.4 Защищенность от повреждений системы
Защищенность системы телемеханики определяется как ее способность избегать попадания контролируемой системы в опасную или нестабильную ситуацию. Возникновение нестабильной ситуации связано с последствиями отказов, возникающих из-за неисправности аппаратуры телемеханики, необнаруженных ошибок, а также потерь информации.
Последствия отказа могут зависеть от состояния энергосистемы в момент отказа. Опасная ситуация может возникнуть при комбинации отказа в системе телемеханики и особой ситуации в энергосистеме. В этих случаях вероятность появления опасной ситуации есть произведение вероятности появления отказа и вероятности особой ситуации в энергосистеме при условии, что эти два события независимы друг от друга.
Меры по улучшению защищенности системы приведены в приложении А, п.А.4.
3.5 Достоверность передаваемых данных
Достоверность данных определяется как неизменность содержания информации при ее передаче между источником и получателем. В системах телемеханики достоверность данных связана с вероятностью появления необнаруженных ошибок, что в результате дает неправильную информацию о действительном состоянии процесса при контроле или вызывает непредвиденные действия при управлении.
Классы достоверности определяют верхние пределы вероятности появления необнаруженных ошибок информации на пути от источника информации до ее получателя, включая сбор данных, обработку и передачу. Вероятность ошибок учитывает вероятность появления необнаруженных ошибок (МЭС 371-08-06)* и вероятность необнаруженных потерь сообщений (МЭС 371-08-10).
____________
* МЭС - Международный электротехнический словарь - МЭК 50 (ч. 371).
В стандарте МЭК 870-5-1 этой серии в п.4.1 установлены три класса достоверности данных для определения верхнего предела вероятности появления необнаруженных ошибок в сообщении (остаточные ошибки в сообщении) в зависимости от частоты искажений бита в канале передачи. Такой путь определения класса достоверности данных необходим для телемеханических каналов связи, т.к. окружающие условия, вызывающие искажения передаваемых данных, в значительной степени непредсказуемы, а средства защиты данных от появления необнаруженных ошибок кодовыми методами ограничены.
3.5.1 Требования к достоверности данных
Средняя частота искажения бита в каналах телемеханики (МЭС 371-08-07), работающих с правильно отрегулированным сигналом и параметрами цепи и предусматривающих соответствующее экранирование, должно быть меньше ![]() = 10
= 10![]() .
.
Примечание - Качество каналов передачи должно определяться периодическим контролем числа ошибок в сообщении. Если это число превышает предел, соответствующий частоте искажений бита ![]() = 10
= 10![]() , то требуется профилактический ремонт канала связи.
, то требуется профилактический ремонт канала связи.
Значение ![]() = 10
= 10![]() (см. черт.1 МЭК 870-5-1) применяется как стандартная для задания верхнего предела вероятности необнаруженных ошибок на всем пути от источника до получателя, включая оконечную аппаратуру данных, используемую для сбора данных, и аппаратуру обработки и отображения данных.
(см. черт.1 МЭК 870-5-1) применяется как стандартная для задания верхнего предела вероятности необнаруженных ошибок на всем пути от источника до получателя, включая оконечную аппаратуру данных, используемую для сбора данных, и аппаратуру обработки и отображения данных.
Соответствующие классы достоверности данных приведены в табл.5.
Таблица 5
Класс достоверности данных | Вероятность появления необнаруженных ошибок IE |
11 |
|
12 |
|
13 |
|
Меры для улучшения достоверности данных описаны в приложении А, п.А5.
3.6. Временные параметры
Рассматриваемые временные параметры относятся к характеристикам систем телемеханики и к характеристикам передачи и обработки информации.
Большинство временных параметров в телемеханике включают время передачи информации от источника к получателю. Обозначенное как "полное время передачи" оно определено в МЭС 371-08-15 как "Промежуток времени от момента появления события на передающем пункте до представления информации о нем на приемном пункте".
Полное время передачи используется как характеристика быстродействия системы телемеханики, а также для задания основных требований по быстродействию для конкретных условий применения. Полное время передачи является суммой времени прохождения информацией отдельных частей системы телемеханики. Оно связано не только с характеристиками устройств, но также с влиянием следующих факторов:
- конфигурации сети связи;
- методов передачи телемеханической информации;
- ширины частотной полосы канала связи;
- функций предварительной обработки на передающем пункте;
- функций обработки на приемном пункте;
- уровня помех в канале связи;
- накопления событий за заданный период времени;
- приоритетов в протоколе передачи данных.
Полное время передачи связано только с определенными системами телемеханики и поэтому само по себе не классифицируется.
Определены и другие временные параметры, а именно (см. МЭС 371-08-16-371-08-22):
- время телепередачи;
- максимальное и среднее время передачи;
- время пуска и повторного пуска.
Различные типы информации предъявляют различные требования к временным параметрам. В пп.3.6.1-3.6.4 каждый тип информации рассматривают отдельно.
3.6.1 Информация о состоянии
Информация о состоянии может быть разделена на две основные категории:
- высокоприоритетная информация о состоянии, такая, как информация о положении выключателей и важная аварийная сигнализация;
- низкоприоритетная информация о состоянии, такая, как информация о положении разъединителей и второстепенная аварийная сигнализация.
В полном времени передачи имеется существенное различие между этими двумя категориями. Высокоприоритетная информация должна передаваться так быстро, как возможно, и при этом полное время передачи должно быть максимально коротким.
Кроме полного времени передачи, при обработке информации о состоянии важны еще следующие параметры.
Разрешающая способность по очередности (МЭС 371-05-01) - минимальный промежуток времени между событиями, при котором правильно определяется последовательность их появления.
Разрешающая способность по времени (МЭС 371-05-03) - минимальное время между двумя событиями, при котором различимы соответствующие метки времени.
Время подавления - промежуток времени, за который подавляется появившаяся неправильная информация об изменении состояния, вызванная помехой или дребезгом контактов.
Время опроса - минимальный промежуток времени, необходимый для правильного определения и обработки информации о состоянии.
Принятые методы определения характеристик и объемов передаваемой информации в системах телемеханики приведены в приложении А, п.А.6.
3.6.1.1 Требования к временным параметрам
Устройство телемеханики должно обнаруживать и обрабатывать любую информацию об изменении состояния, которое сохраняется дольше, чем заданное время опроса.
Отношение времени опроса ко времени подавления должно быть не более 2:1. Действительное время подавления в конкретных условиях применения должно быть рассчитано на максимальное время дребезга контактов во входной аппаратуре процесса.
Аппаратура телемеханики должна иметь возможность определять и обрабатывать переход входного сигнала из состояния "выключено" в состояние "включено" и наоборот.
Для отдельных сигналов действительной информацией является только переход из состояния "выключено" в состояние "включено" (например, для информации о приращении).
3.6.1.2 Классы временных параметров
Временные требования, относящиеся к обработке информации о состоянии, являются предметом взаимной договоренности. Для установления требований можно использовать табл.6, 7.
Таблица 6
Временной параметр | Требования временного класса | |||
Разрешающая способность, мс | SP1 | SP2 | SP3 | SP4 |
|
|
|
| |
Таблица 7
Временной параметр | Требования временного класса | |||
Разрешающая способность, мс | TR1 | TR2 | TR3 | TR4 |
|
|
|
| |
3.6.2 Управляющая информация
Устройство КП должно иметь интерфейс не менее чем с двумя видами управляющих устройств:
- быстро перемещающимися, достигающими нового определенного состояния менее чем за 250 мс;
- медленно перемещающимися, со временем перемещения от 250 мс до нескольких минут.
Полное время передачи команд должно быть возможно более коротким для обеспечения передачи и обработки команд с высоким приоритетом.
3.6 2.1 Требования к управляющей информации
Оператор должен иметь возможность следить за исполнением команды. Для этого необходимо иметь соответствующие служебные функции контроля и обратную информацию, в том числе и значение измеряемых величин, чтобы подтвердить:
- прием и правильную передачу аппаратурой телемеханики команд;
- выполнение команды периферийным оборудованием.
В случае медленно или очень медленно действующих устройств оператор должен иметь возможность получать промежуточную информацию о состоянии (например, переходное состояние медленно действующего разъединителя). Если промежуточное состояние продолжается дольше определенного (заданного) времени, должна выдаваться информация об ошибке.
3.6.2.2 Классы временных требований
Для обработки управляющей информации не предусматривается никаких классов временных требований. Изготовитель и пользователь договариваются о необходимых значениях временных величин.
3.6.3. Измерения и команды уставки
Временной параметр, связанный с обработкой измеряемых величин и команд уставки, - это полное время передачи (МЭС 371-08-15), см. п.3.6.
Полное время передачи, принятое для системы телемеханики, зависит, в основном, от требований к системе телемеханики и находится обычно в пределах от секунд до минут.
3.6.4 Телесчет (передача интегральных значений)
Интегральные значения поступают на устройства телемеханики в форме дискретных кодированных величин или импульсов приращения, складываемых друг с другом во внутренних счетчиках. Команда на запоминание для интегральных сумм может поступать от местных счетчиков или может быть передана на КП по команде запроса. Необходимо обеспечить, чтобы дальнейшая обработка данных происходила за время, меньшее заданного, и чтобы команда на запоминание посылалась одновременно к определенному числу КП.
Необходимо обеспечить также, чтобы при наихудших условиях передачи время для обработки и передачи интегральных сумм было меньше, чем время суммирования. Кроме того, должны выполняться требования к достоверности данных.
3.7 Общая погрешность
Общая погрешность результатов обработки информации определяется как разность между значениями величин в местах передачи и приема, выраженная в процентах от номинального диапазона. Это относится ко всей информации, которая между источником и местом назначения преобразуется из аналогового значения в цифровое или наоборот.
Общая погрешность включает погрешность отдельных индивидуальных частей на пути прохождения информации от источника к месту назначения.
Термин "класс точности" определяет погрешность устройства, т.е. класс 1 соответствует погрешности 1%.
Если индивидуальные (отдельные) источники погрешности случайны и независимы друг от друга, то общую погрешность рассчитывают по формуле
![]() , (3)
, (3)
где ![]() ,
, ![]() и др. - отдельные погрешности, относящиеся к соответствующим частям, приведенным на черт.1.
и др. - отдельные погрешности, относящиеся к соответствующим частям, приведенным на черт.1.
Черт.1. Обработка аналоговой информации
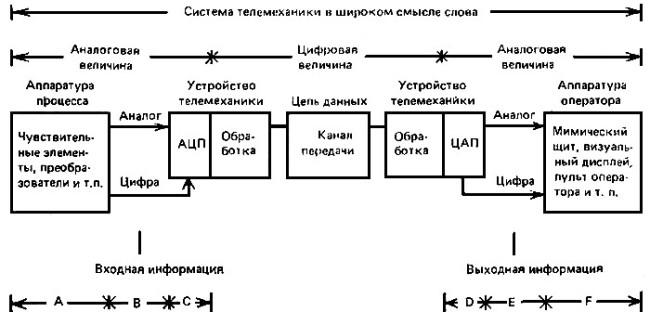
АЦП - преобразователь аналог/цифра
ЦАП - преобразователь цифра/аналог
Черт.1
3.7.1 Требования к точности
Требуемая точность сбора, передачи и вывода значений измеряемых величин, команд уставки, интегральных сумм должна согласовываться с требованиями процесса.
Чтобы достичь необходимой общей точности, требования к точности отдельных частей по черт.1 должны быть такими, чтобы выдерживалась общая заданная точность.
Более подробная информация, относящаяся к общей погрешности, приведена в приложении А, п.А.7.
3.7.2 Классы точности
Используемые классы точности выбирают из табл.8.
Таблица 8
Класс точности | Общая погрешность, % |
А1 | 5,0 |
А2 | 2,0 |
A3 | 1,0 |
А4 | 0,5 |
Ах | Специальный класс (например, для цифровых входных величин) |
3.7.2.1 Устройства телемеханики
Оценка класса точности должна включать аппаратные погрешности, зависящие от допусков на элементы, старения аппаратуры, внешних условий, ошибок линеаризации, изменений напряжения питания. Кроме аппаратных погрешностей должна учитываться погрешность преобразования аналог/цифра и цифра/аналог, равная ±1/2 младшего разряда. Этой погрешностью определяется соотношение между числом импульсов кода в цифровой кодированной информации и классом точности.
Класс Ах включен для передачи информации в цифровом виде, исключающем погрешность преобразования.
Входная информация - часть С по черт.1.
Аналого-цифровой преобразователь (АЦП) преобразует измеряемую аналоговую величину в кодированную цифровую информацию.
Входная цепь и АЦП должны поддерживать точность в заданных пределах.
Перегрузка указывается определенным максимальным значением цифровой величины. Обработка данных не должна ухудшать точности цифровой величины.
Выходная информация - часть D по черт.1.
В этой части дискретная информация преобразуется в эквивалентную аналоговую величину при помощи цифро-аналогового преобразователя (ЦАП).
Точность преобразования гарантируется только при определенной нагрузке. ЦАП не должен повреждаться ни при коротком замыкании, ни при разрыве цепи нагрузки (режим холостого хода).
3.7.2.2 Другая аппаратура в системе телемеханики
Требования этого пункта относятся к аппаратуре процесса, аппаратуре оператора и к каналу связи - части А, В, Е, F черт.1.
Части А и F
Датчики, преобразователи и аппаратуру оператора выбирают по соответствующим стандартам.
Части В и Е
Помехи могут исказить сигналы в кабелях (линиях связи). Снижение до минимума влияния помех на измерительные сигналы должно быть обеспечено соответствующими экранированием и прокладкой кабеля. При этом точность не должна ухудшаться.
4 ВОЗМОЖНОСТЬ РАСШИРЕНИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ
У большей части систем телемеханики в течение срока их службы бывает необходимость расширять или модернизировать их функции, чтобы приспособить их к изменениям обслуживаемого процесса.
Возможность расширения системы телемеханики - это характеристика, отражающая способность системы телемеханики к расширению и модификации. Возможность расширения можно оценить по тем условиям, которые требуются для расширения и модификации, и продолжительностью простоя системы телемеханики или ее частей в процессе расширения.
Добавление обработки данных и пользовательских функций, а также расширение и модификация имеющихся функций системы телемеханики обычно влекут расширение или модернизацию систем телемеханики и программного обеспечения.
Возможность расширения устройств телемеханики как свойство конструкции следует рассматривать в начальной стадии разработки и проектирования, и поэтому важно, чтобы требования к возможности расширения были установлены предварительно, для облегчения составления требований к устройствам телемеханики.
Оценка возможности расширения должна включать следующие требования:
- минимальные изменения в установленном устройстве телемеханики и программном обеспечении;
- недопущение ухудшения надежности и защищенности системы телемеханики;
- минимальное время простоя системы, необходимое для выполнения изменений в системе и испытаний.
Методы представления и оценки возможности расширения устройств телемеханики представлены в приложении В.
5 ВЛИЯНИЕ СИСТЕМЫ ТЕЛЕМЕХАНИКИ НА ОКРУЖАЮЩУЮ СРЕДУ
5.1 Электрические влияния
5.1.1 Потребление
Должны быть установлены требования к максимальной пиковой мощности для каждого источника питания.
Должна быть обеспечена возможность расчета требований к потребляемой мощности для любой конфигурации системы телемеханики по данным, установленным изготовителем.
5.1.2 Пусковой ток
В табл.9 приведены мгновенные значения токов ![]() для индивидуальных источников питания в моменты времени
для индивидуальных источников питания в моменты времени ![]() , равные 0, и для установившихся условий
, равные 0, и для установившихся условий ![]() 2 с.
2 с. ![]() - номинальное значение тока источника питания постоянного или переменного тока.
- номинальное значение тока источника питания постоянного или переменного тока.
Таблица 9
| |||
| Класс S1 | Класс S2 | Класс S3 |
50 мс |
|
|
|
1,5 мс |
|
|
|
30 мс |
|
|
|
500 мс |
|
|
|
|
|
|
|
5.1.3 Искажение гармонических составляющих тока
Искажение гармонических составляющих тока, производимое устройством телемеханики, не должно влиять на расположенное рядом оборудование.
Питание постоянным током
Максимальное значение двойной амплитуды переменной составляющей потребляемого тока на низких частотах (<50 кГц) должно быть меньше, чем большее из значений:
0,3 ![]() или 250 мА, где
или 250 мА, где ![]() - ток потребления.
- ток потребления.
Питание переменным током
Максимальный коэффициент формы кривой тока, полученный как отношение амплитудного значения к среднему квадратическому, должен быть меньше 5.
5.2 Акустический шум
Устройство телемеханики, установленное вблизи оперативного персонала или помещения, где работает оперативный персонал, не должно производить акустический шум, который может причинить ущерб или утомить персонал, и мешать звуковой связи. На черт.2 приведены кривые, устанавливающие уровни критерия помех.
Черт.2. Кривые зависимости критерия (NC) помех для телефонной связи
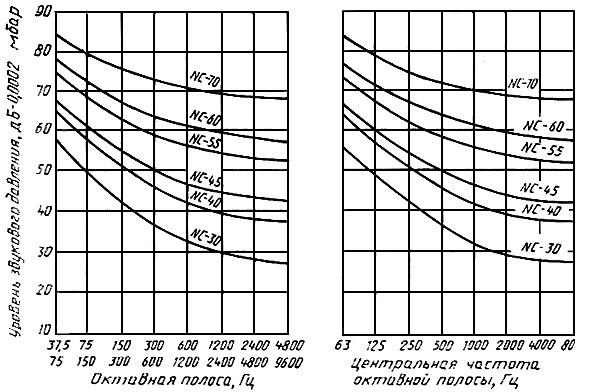
Черт.2
Помехи, генерируемые устройством телемеханики, не должны превышать уровень NC-30 при установке на диспетчерских пунктах и NC-45 для эксплуатационных помещений.
5.3 Тепловые влияния
Тепловые влияния рассматриваются.
ПРИЛОЖЕНИЕ А (обязательное). МЕРЫ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ ТЕЛЕМЕХАНИКИ
ПРИЛОЖЕНИЕ А
Обязательное
А1 Безотказность
Показатели безотказности системы телемеханики могут быть улучшены, если принять во внимание следующее:
- отказ любого элемента не должен приводить к потере всех функций, а только той функции, для которой этот элемент необходим. В частности, т.к. аппаратура телемеханики связана с контролем и управлением территориально-распределенными процессами, то повреждение элемента в одном месте не должно приводить к потере работоспособности в других местах;
- отказ любого элемента не должен приводить к необнаруженной потере функционирования;
- должна быть предусмотрена защита от множественных или зависимых отказов элементов;
- в случае отказа одного элемента основные функции должны сохраняться;
- аппаратура телемеханики для энергосистем должна быть достаточно устойчива к возможным нарушениям в энергосистемах. Однако, если в результате экстремальных нарушений наступит кратковременное повреждение аппаратуры телемеханики, оно не должно приводить к отказам;
- все стандартные программы и подпрограммы должны быть отлажены до включения аппаратуры телемеханики;
- важно оценить все условия, которые могут возникнуть при реальном программировании;
- нагрузка на центральный процессор в системах телемеханики на микро-ЭВМ не должна быть слишком большой, иначе могут иметь место отказы.
А2 Готовность
Показатели готовности системы телемеханики могут быть улучшены соответствующими мерами при ее разработке. Такими методами являются: соответствующее резервирование аппаратуры телемеханики, а также использование мер контроля, сообщающих о повреждениях или автоматически обеспечивающих продолжение работы. Эти меры включают:
- контроль функции сбора данных;
- проверку функций контроля;
- контроль функций считывания;
- контроль функций опроса;
- контроль функций регистрации;
- наблюдение за переполнением очереди;
- средства диагностики оборудования;
- контроль градуировки;
- автоматический повторный запуск после отказа питания;
- самоконтроль аппаратуры;
- автоматическое повторное включение;
- внутренние функции обеспечения безотказности;
- повторную передачу данных.
Аварийный сигнал должен быть выработан всякий раз при автоматическом или ручном отключении или при отказе любого устройства. Любое автоматическое или ручное включение резервного оборудования или отдельных узлов должно регистрироваться или сообщаться другим способом.
Повторная передача данных инициируется, если КП не получает сообщение или не отвечает на неискаженное сообщение. Передающая станция передает повторные сообщения заданное число раз.
Случайные ошибки передачи или временные перегрузки приемных станций подсчитываются и информация о них затем передается. Постоянные ошибки или отказы инициируют соответствующие аварийные сигналы.
Работа каналов связи должна проверяться постоянно, во время обычной передачи или периодически специальными тестовыми сообщениями.
A3 Ремонтопригодность
Обеспечение ремонтопригодности системы телемеханики включает:
- самопроверки аппаратуры, диагностические процедуры и процедуры поиска неисправностей для локализации любого отказа до самого нижнего уровня заменяемости узла;
- легкодоступное тестирование и/или доступ к точкам повреждения для обеспечения изоляции повреждения, а расположение элементов на платах должно обеспечивать доступ к контрольным ключам и разъемам;
- соответствующие захваты или ручки для облегчения безопасного снятия установки тяжелых или громоздких узлов;
- конструктивные меры для предотвращения замены элементов или узлов подобными по форме, но в действительности не взаимозаменяемыми;
- конструктивные меры, предотвращающие неправильную установку узлов или элементов;
- обеспечение идентификации и замены взаимозаменяемых узлов и деталей (например, маркировка);
- меры, гарантирующие, что в средства идентификации, ориентации и подгонки включены кабели и разъемы;
- регулируемые элементы, расположенные или защищенные таким образом, чтобы регулировка не могла быть нарушена по неосторожности;
- расположение внутренних точек вдали от опасных напряжений. Если это невозможно, то эти точки должны быть экранированы и маркированы;
- расположение точек, находящихся под напряжением таким образом, чтобы предупредить случайные короткие замыкания во время монтажа, установки или обслуживания;
- программная минимизация отказов при профилактическом обслуживании;
- обеспечение имитации аппаратуры, удаленной от испытуемого оборудования.
А4 Защищенность от повреждений системы
Кроме характеристик, обеспечивающих безотказность систем, перечисленных в А1, для улучшения защищенности система должна удовлетворять следующим требованиям:
- отказ одного элемента в любом месте системы не должен вызывать критического отказа (т.е. отказа, который может причинить вред людям или существенный материальный ущерб);
- использование избыточных структур с независимыми подсистемами (выполняющими отдельные функции) вплоть до использования резервных центральных процессоров;
- избежание полных отказов;
- использование специальных предпрограммируемых процедур (выполнение местной обработки и передачи данных);
- местная внутренняя защита в устройствах управления;
- индикация мест повреждения.
В конструкции систем телемеханики должны быть учтены возможные ошибки человека-оператора или даже неосторожные действия оператора или случайных лиц.
А5 Достоверность данных
Для получения правильной и полной информации (контрольной и управляющей) должны быть приняты следующие меры:
- во всех случаях обнаруженная ошибка в сообщении не должна вызывать опасного отказа системы. Частота необнаруженных ошибок в сообщении для такой важной информации как команды, должна удовлетворять требованиям класса достоверности данных 13.
Меры, улучшающие достоверность:
- контроль качества передаваемого сигнала;
- передача информации кодами с высокой избыточностью;
- эффективные средства обнаружения ошибок;
- надлежащая синхронизация блоков данных;
- процедуры передачи, такие, как использование предварительной и исполнительной команд;
- повторная передача той же самой информации;
- оценка состояния;
- информационная обратная связь.
А5.1 Контрольная информация
Различные виды запуска передачи требуют различных классов достоверности данных по отношению к необнаруженным искажениям контрольной информации или необнаруженным потерям информации.
В циклических системах телемеханики допускается большая вероятность ошибочной информации, чем в спорадических, т.к. в циклических системах ошибочная информация с большой вероятностью будет исправлена в следующем цикле.
Для ограничения погрешности измерения при перегрузке датчиков (преобразователей) желательно выбирать диапазон измерения 120% номинального значения. Чувствительные элементы и преобразователи следует отстраивать от больших перегрузок, но о их появлении персонал должен быть информирован.
А5.2 Команды
Должны быть приняты меры против ошибочных команд на всем пути от запуска на ПУ до выхода на КП.
На КП должна быть гарантия того, что только та выходная цепь, которая соответствует адресу передаваемого сообщения, посланного с ПУ, правильно выбрана перед посылкой команды.
Один из методов выполнения этого - декодирование команды, выбор выходной цепи, кодирование вновь и сравнение. Сравнение может выполняться автоматически, предпочтительно на ПУ после передачи обратной информации.
Другой рекомендуемый метод - подача предварительной и исполнительной команд (МЭС 371-03-19). Предварительная команда вызывает подготовку выходной операции на КП (выбор предполагаемой выходной цепи). Результат этой операции воспроизводится оператору на ПУ при помощи информации об исполнении (МЭС 371-02-05), после чего оператор может решить, послать ему исполнительную команду или отменить операцию.
А6 Временные параметры
Важнейшая характеристика времени, относящаяся к информации о состоянии, - это полное время передачи, которое зависит не только от характеристик аппаратуры телемеханики (процедуры передачи, длины сообщения, скорости передачи и т.п.), но также и от:
- возможного числа изменений состояния за короткий промежуток времени;
- использования информации о состоянии на ПУ;
- нарушений в каналах связи (повторения, переключения каналов).
Один из методов определения условий прохождения данных - это установление полного времени передачи для одного изменения состояния при определенной скорости передачи и нормальных условиях.
Другой метод - рассмотрение наихудших условий и состояния характеристик при:
- возможном числе изменений состояния за 1 с;
- возможном числе изменений состояния за 30 с и максимального полного времени передачи для последнего изменения состояния.
В этом случае изготовитель должен установить полное время передачи для последнего изменения состояния при передаче без ошибок.
Еще один метод - просить изготовителя установить максимальное число событий за определенный период времени, в течение которого можно передать информацию без ошибок и очереди.
Предел условий правильной передачи может быть определен, например, частотой ошибки на бит меньше, чем 10![]() .
.
А7 Точность
Контроль и управление территориально распределенным процессом требуют постоянного получения значений измеряемых величин и интегральных сумм.
Аналоговые величины перед дальнейшей обработкой и передачей преобразуются в цифровую форму.
Помехи, возникающие из-за разности потенциалов и флюктуаций электромагнитного поля, могут попадать в линию передачи через емкостную и/или индуктивную связь и искажать информационные сигналы.
А7.1 Аналоговые величины
Метод аналого-цифрового преобразования выбирается в зависимости от временных требований, точности и ожидаемых помех.
Метод текущих значений
Этот метод основан на преобразовании значения сигнала (информации или помех), имеющегося в данный момент. Особое внимание требуется к каналам передачи и фильтрации, т.к. при этом методе измерения ошибки и помехи последовательного типа отражаются на результате. Этот метод применяют во всех случаях, когда быстро опрашивается большое число измерения.
Метод интегрирования
При этом методе используют среднее значение входного сигнала за период интегрирования. На практике за время интегрирования принимают значение, обратное частоте первой гармоники (или кратное). Этот метод применяют для медленно меняющихся сигналов. Опрос измеряемых величин с большого числа точек измерения за короткое время может также выполняться с одновременным использованием нескольких аналого-цифровых преобразователей.
Дополнительное сглаживание (до и после преобразования) для подавления кратковременных изменений измеряемых величин, например при переключениях.
Дополнительный расчет средних значений за длительный период времени (в диапазоне секунд или минут).
А7.2 Параллельно-кодированная информация
В этом случае значения величин поступают в аппаратуру телемеханики уже в кодированной форме. Чтобы гарантировать достоверность данных, принимаются меры, обеспечивающие неизменность информации во время опроса.
А7.3 Считывание со счетчиков
Должны быть соблюдены следующие указания:
- период считывания должен быть короче времени переполнения счетчика;
- должна быть точно задана временная база периода считывания;
- все импульсы приращения должны быть правильно определены и обработаны.
А7.4 Полное время передачи
На пути информации oт источника к пользовтелю имеется несколько участков запаздывания (некоторые из них не относятся к цифровым величинам):
- дополнительное время работы аппаратуры процесса, например, преобразователей (датчиков);
- время опроса (сканирования) информации;
- время аналого-цифрового преобразования;
- время запаздывания при передаче, вызванные:
- командами запроса,
- циклической или спорадической передачей,
- приоритетом информации,
- совпадением сообщений для передачи,
- пороговой передачей измерений (см. примечание);
- время передачи, зависящее от пути передачи (канала связи), вида передачи и трафика, требуемой точности аналоговых величин (и отсюда - необходимой длины слова);
- время цифро-аналогового преобразования;
- дополнительное время работы аппаратуры оператора.
Примечание - Пороговая передача измерений.
Измеряемые величины передаются только в том случае, если они изменились больше, чем заданные пределы (мин/макс). Этот метод уменьшает количество данных, передаваемых в стабильных условиях, и позволяет использовать более низкие скорости передачи, но может влиять на точность измерения.
Если точность измерения должна выдерживаться без увеличения скорости передачи, то рекомендуется метод передачи, зависящий от скорости изменения измеряемой величины (градиента).
ПРИЛОЖЕНИЕ В (обязательное). ОЦЕНКА ВОЗМОЖНОСТИ РАСШИРЕНИЯ СИСТЕМЫ
ПРИЛОЖЕНИЕ В
Обязательное
Возможность расширения может быть оценена на основании табл.В1-В4, применяемых как для КП, так и для ПУ.
Таблицы заполняет изготовитель для условий, предлагаемых или необходимых для аппаратуры, и в зависимости от времени простоя, требуемого для установки и испытаний модификаций. Возможные примеры условий обозначены буквами от А до Е.
Если используются одновременно два условия, например В и С, они оба включаются в таблицу.
Таблицы отличаются друг от друга типом расширения:
- расширение по количеству данных;
- расширение по функциям.
1) Количество данных процесса
Этот тип расширения - увеличение количества данных процесса. Он предусматривает расширение аппаратуры интерфейса и необходимых программных средств, но исключает дополнительные к существующим функции.
Для типового расширения от 20 до 50% по отношению к существующим объемам системы изготовитель должен установить условия, требуемые или предлагаемые для устройства телемеханики, и время простоя в часах для установки, и испытаний.
Таблица В1
Расширение данных процесса
Расширение для | Расширение | |||
% | % | |||
Условие | Время | Условие | Время | |
Цифровых входов | ||||
Аналоговых входов | ||||
Цифровых выходов | ||||
Аналоговых выходов | ||||
КП | ||||
Условия: A - нет возможности; В - необходима установка (монтаж) дополнительных устройств; С - необходимы дополнительные программы; D - съемный блок; Е - оснащено всем для полного расширения.
2) Пользовательские функции
Этот тип расширения требует введения дополнительных пользовательских функций, используемых при обработке данных, вместе с добавочными видами передачи и трафика, и, в основном, включает расширение существующего программного обеспечения.
Таблица В2
Расширение пользовательских функций
Дополнительные пользовательские функции | КП | ПУ | ||
Условия | Время простоя | Условия | Время простоя | |
Контролирующие функции: | ||||
- одноэлементная информация | ||||
- двухэлементная информация | ||||
- информация о кратковременном состоянии | ||||
- изменение положения отпаек трансформатора (двоичная информация) | ||||
- импульсы счетчика | ||||
- измерения | ||||
- метка времени | ||||
- аналоговые величины | ||||
Командные функции: | ||||
- однопозиционная команда | ||||
- двухпозиционная команда | ||||
- импульсная команда | ||||
- команда уставки | ||||
Условия: А - нет возможности; В - требуются дополнительные устройства; С - модификация работающей программы; D - замена вставных программных элементов; Е - уже установлено.
Таблица В3
Расширение дополнительных функций обработки
Функции обработки | Условия | Время простоя |
Обработка пределов | ||
Обработка порогов | ||
Временная синхронизация | ||
Программы переключения | ||
Сброс нагрузки | ||
Регистрация |
Условия: А - нет возможности; В - требуются дополнительные устройства; С - модификация работающей программы; D - замена вставных программных элементов; Е - уже установлено.
Таблица В4
Расширение передачи данных
Тип передачи | Тип трафика | |||
Трафик-точка-точка | Многоточечный график | |||
Условия | Время | Условия | Время | |
Циклическая | ||||
По запросу | ||||
Спорадическая | ||||
Условия: А - нет возможности; В - требуются дополнительные устройства; С - модификация работающей программы; D - замена вставных программных элементов; Е - уже установлено.