ГОСТ Р МЭК 870-1-1-93
Группа П77
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 1. Основные положения
Раздел 1. Общие принципы
Telecontrol equipment and systems. Part I. General
considerations. Section One - General principles
ОКП 42 3200
Дата введения 1995-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством топлива и энергетики Российской Федерации
РАЗРАБОТЧИКИ
Ц.Е.Геронимус (руководитель темы), К.Г. Митюшкин, д-р техн. наук
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России N 309 от 30 12.93
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 870-1-1-88 "Устройства и системы телемеханики. Часть I. Основные положения. Раздел I. Общие принципы"
3. ВВЕДЕН ВПЕРВЫЕ
4. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение отечественного НТД, на который дана ссылка | Обозначение соответствующего международного стандарта | Пункт, подпункт, в которых приведена ссылка |
ГОСТ Р МЭК 870-2-1-93 | МЭК 870-2-1-88 | 3.3.2 |
ГОСТ Р МЭК 870-4-93 | МЭК 870-4-90 | 3.3 |
ГОСТ Р МЭК 870-3-93 | МЭК 870-3-89 | 4.2 |
ВВОДНАЯ ЧАСТЬ
ВВОДНАЯ ЧАСТЬ
Системы телемеханики служат для контроля и управления территориально распределенными технологическими процессами. Они включают в себя оборудование, предназначенное для выполнения функций сбора, передачи, обработки и отображения необходимых данных о течении технологического процесса.
Характеристики систем телемеханики обуславливаются в основном:
достоверностью информации, передаваемой от источника к месту назначения;
скоростью передачи информации к месту назначения.
Достоверность данных определяется как неизменность содержания информации на пути от источника к месту назначения, а скорость передачи информации определяется полным временем передачи.
Из-за возможности возникновения неблагоприятных условий окружающей среды и повышенных требований к передаче команд необходимы стандарты по сбору данных, определяющие жесткие характеристики достоверности данных и эффективности их передачи.
Данная серия стандартов была разработана специально для систем телемеханики, используемых в электроэнергетических системах, однако их можно использовать в других областях применения таких систем как подача и распределение воды и газа и т.п.
Настоящие стандарты разработаны с целью представления пользователям информации, необходимой для правильного планирования и надежной работы систем телемеханики. Стандарты подразделяются на несколько различных частей, перечисленных в разд.2 настоящего стандарта.
Раздел 1 части 1 серии стандартов по телемеханике содержит общий обзор таких систем и их составных элементов. Он представляет пользователю основную информацию, необходимую для полного понимания всех последующих частей серии стандартов.
1. ОБЛАСТЬ ПРИМЕНЕНИЯ
Данная серия стандартов распространяется на вновь разрабатываемые устройства и системы телемеханики с передачей информации кодированной последовательностью бит для контроля и управления территориально распределенными процессами.
2. ОБЪЕКТ СТАНДАРТИЗАЦИИ
Стандарты этой серии описывают конфигурацию и функции систем телемеханики и связанных с ними устройств. Они устанавливают функциональные требования, логические характеристики и интерфейсы основных устройств, а также правила, по которым эти устройства должны взаимодействовать друг с другом.
Данные стандарты не устанавливают ни внутренние физические характеристики устройств, ни требования к проектированию, ни конструкцию и используемые материалы.
Вне области применения данных стандартов находятся следующие вопросы:
системы циркулярного управления;
характеристики каналов связи и систем местных шин для связи между элементами процесса ввода-вывода;
телезащита и функции местной автоматики, даже если они являются частью системы телемеханики.
Стандарты подразделяются на несколько частей, которые разделены на несколько разделов и изданы в виде отдельных стандартов. Данные стандарты имеют следующие наименования и области применения:
ГОСТ Р МЭК 870-1-1-93 "Устройства и системы телемеханики. Часть 1. Общие положения. Раздел 1. Основные принципы".
Данный стандарт содержит описание структурных элементов, конфигураций, а также основных функций систем телемеханики.
В стандарте дан обзор функциональных элементов, которые влияют на основные структуры и возможный выбор конфигураций систем телемеханики.
Это относится к функциям, которые являются типовыми для любого контролируемого и управляемого процесса, но особо подчеркиваются специфические проблемы, характеризующие территориально распределенные процессы, и влияние линий связи с ограниченной полосой частот и низким отношением сигнал-помеха.
Раздел 1 части 1 служит введением к более детальным стандартам и рекомендациям, изложенным в частях 2-5.
МЭК 870-1-2-93* "Устройства и системы телемеханики. Часть 1. Общие положения. Раздел 2. Руководство по спецификации".
_____________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
В разделе 2 части 1 приводятся руководящие указания для планирования (проектирования) и устанавливаются спецификации для систем и аппаратуры телемеханики, согласовывающие индивидуальные требования для пользователя.
МЭК 870-1-3* "Устройства и системы телемеханики. Часть 1. Общие положения. Раздел 3. Словарь терминов".
_____________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
В разделе 3 части 1 приведены термины по телемеханике, установленные в международном электротехническом словаре (МЭС) МЭК 50 (часть 371), а также другие термины, необходимые для понимания данной серии стандартов.
ГОСТ Р МЭК 870-2-1-93 "Устройства и системы телемеханики. Часть 2. Условия эксплуатации. Раздел 1. Условия окружающей среды и источники питания".
В разделе 1 части 2 установлены условия окружающей среды и источники питания, на которые должно быть рассчитано устройство телемеханики. Установлены также классы для различных условий эксплуатации и даны указания по выбору методик проведения испытаний.
МЭК 870-2-2* "Устройства и системы телемеханики. Часть 2. Условия эксплуатации. Раздел 2. Электромагнитная совместимость, влияние коррозии и эрозии".
_____________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
В разделе 2 части 2 будут установлены требования к электромагнитной совместимости, а также к влиянию коррозии и эрозии на устройства и системы телемеханики.
ГОСТ Р МЭК 870-3-93 "Устройства и системы телемеханики. Раздел 3. Интерфейсы (электрические характеристики)".
В части 3 установлены требования к интерфейсам, связывающим различные устройства, необходимые для создания системы телемеханики и дающие пользователю возможность управлять ее работой.
ГОСТ Р МЭК 870-4-93 "Устройства и системы телемеханики. Часть 4. Технические требования".
В части 4 установлены характеристики, которым должны удовлетворять устройства и системы телемеханики, чтобы они могли непрерывно, точно и надежно выполнять возложенные на них функции, обладать достаточной гибкостью, чтобы их можно было приспособить к будущим запросам пользователя.
МЭК 870-5* "Устройства и системы телемеханики. Часть 5. Протоколы передачи".
_____________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
В части 5 описываются функциональные характеристики передачи данных, обеспечивающие работу систем телемеханики по линиям или сетям, требования к достоверности передачи информации, а также методы передачи информации и используемые при этом форматы данных, удовлетворяющие этим требованиям.
Эта часть будет содержать несколько разделов.
К данным стандартам могут быть разработаны дополнительные части и разделы.
3. ОБЩИЕ ВОПРОСЫ, ОТНОСЯЩИЕСЯ К СИСТЕМАМ ТЕЛЕМЕХАНИКИ
Основные аспекты работы территориально распределенных процессов, таких как производство, передача и распределение различных видов продукции (вода, нефть, газ или электроэнергия) оказываются весьма схожими. Системы телемеханики, предназначенные для управления работой электроэнергетических систем, развиты до высокого уровня и часто служат примером для аналогичных разработок в других областях. Поэтому работа любого территориально распределенного процесса разъяснена ниже на примере работы энергосистемы.
3.1. Роль систем телемеханики в работе энергосистем
Качество энергоснабжения потребителей, включая его надежность, в большей степени зависит от существующей системы телемеханики, которая обеспечивает выполнение всех необходимых функций контроля и управления. Структура систем телемеханики диктуется построением самой энергосистемы и стратегией работы, применяемой пользователем. Это система управления распределенным процессом, согласованная с иерархической структурой территориально распределенных сетей передачи и распределения электроэнергии. Типовой пример системы телемеханики приведен на черт.1.
ТИПОВАЯ ИЕРАРХИЧЕСКАЯ СТРУКТУРА ТЕЛЕМЕХАНИЧЕСКИХ СВЯЗЕЙ ДЛЯ СЕТИ ПЕРЕДАЧИ И РАСПРЕДЕЛЕНИЯ ЭЛЕКТРОЭНЕРГИИ
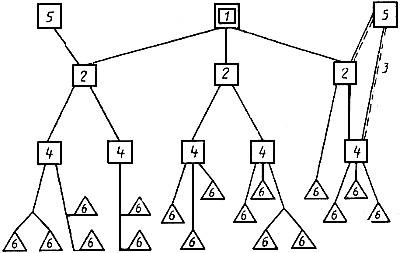
1 - главный (или национальный) пункт управления; 2 - региональный или областной пункт управления; 3 - альтернативный вариант (электростанция может быть подчинена областному или районному пункту управления); 4 - районный пункт управления; 5 - электростанция; 6 - контролируемая станция или удаленный терминал
Черт.1
Система может обслуживать всю энергетическую сеть или быть разделена на различные уровни обслуживания или частично (или полностью) независимые подсистемы.
Местные системы управления на электростанции обычно независимы от системы телемеханики энергосети, однако некоторые данные от сети управления электростанций поступают в систему телемеханики энергосети, и наоборот, такая управляющая информация, как контрольные точки генерации электроэнергии, передается на электростанции (например, в случае АРЧМ)*.
________________
* АРЧМ - автоматическое регулирование частоты и мощности.
Конфигурации систем телемеханики весьма различны - от простых систем, построенных по принципу "пункт-пункт" и осуществляющих функции управления и контроля, до больших многоуровневых систем на обширных территориях.
Использование компьютерной техники на всех уровнях системы позволяет применять в построении систем телемеханики методы распределенной обработки информации*, создавая возможность предварительной обработки данных (чтобы избежать больших потоков информации). Для достижения требуемого уровня надежности для жизненно важных функций должны быть предусмотрены различные степени избыточности.
____________
* Метод частичной обработки информации "на местах" с последующей передачей ее центральной ЭВМ в противоположность методу передачи всей информации в центр в необработанном виде.
Такие задачи обработки, как АРЧМ, анализ надежности, оценка состояния и краткосрочное прогнозирование, также могут выполняться отдельной ЭВМ либо системой телемеханики в реальном масштабе времени в соответствии с выбранным построением системы.
Различное оборудование и подсистемы часто производятся различными изготовителями. Кроме того, они могут относиться к различным поколениям. Поэтому объединение их в единую систему телемеханики создает ряд проблем.
3.2. Каналы связи
Важным фактором, который необходимо учитывать на стадии проектирования системы телемеханики, является выбор канала связи.
Наиболее широко используются радиорелейные линии, ВЧ каналы по ВЛ, а также отраслевые или арендуемые кабели связи. Поскольку система телемеханики работает в реальном масштабе времени, ограничения, накладываемые на ее работу характеристиками каналов связи, могут значительно снизить общую эффективность такой системы. Ширина полосы пропускания ограничена, следствием этого является ограниченная скорость передачи в условиях внешних помех, которые могут исказить отдельные элементы передаваемого сигнала. Однако характеристики каналов связи должны быть выбраны так, чтобы имелась возможность не ухудшить характеристики всей системы в целом. С этой точки зрения каналы связи должны рассматриваться как составная часть системы телемеханики.
Следует учитывать, что аппаратура связи расположена в непосредственной близости от высоковольтного оборудования (выключатели, разъединители) и подвергается воздействию интенсивных пакетов помех и переходных напряжений. Особенно это касается ВЧ каналов по ВЛ.
Технические требования и граничные условия на использование систем телемеханики в качестве систем телеотключения при защите линии передач, в схемах поддержания баланса генерируемой и потребляемой мощности и т.п. (где мгновенная реакция в режиме реального масштаба времени очень важна) обычно таковы, что процесс передачи требует прямых логических связей между источниками и получателями информации. Это значит, что использование памяти и предварительной обработки или пакетного переключения в таких системах полностью исключено.
Имеются телемеханические функции с более простыми техническими требованиями, которые могут использовать обычную технику и стандарты, разработанные для ведомственной автоматики. Обмен данными между центральными станциями: областными, районными и национальными попадает под эту категорию.
3.3. Требования к проектированию системы телемеханики
Подробно этот вопрос освещен в ГОСТ Р МЭК 870-4.
3.3.1. Функциональные характеристики
Система должна быть спроектирована так, чтобы оператор мог получить правильную информацию из стратегически важных точек энергосистем о действительном оперативном состоянии энергосистемы и быть в состоянии быстро и точно реагировать на эту информацию.
3.3.2. Условия окружающей среды
Установленная аппаратура работает правильно в определенных рабочих условиях окружающей среды. Конкретные характеристики и классификация окружающей среды установлены в ГОСТ Р МЭК 870-2-1.
3.3.3. Надежность, готовность, безопасность (НГБ)
Требования, предъявляемые к таким характеристикам как надежность, готовность и безопасность, зависят от конкретных условий применения. Этим требованиям должна удовлетворять как вся система в целом, так и все ее функциональные элементы. Это относится и к источникам гарантированного питания, которые обычно не являются частью системы телемеханики. Особое внимание должно быть уделено электромагнитной совместимости всего электронного оборудования, входящего в систему телемеханики.
Системы должны быть рассчитаны для работы в условиях возникающих неисправностей отдельных элементов, при повреждении которых должен немедленно выдаваться сигнал.
3.3.4. Удобство обслуживания и ремонта, оснащенность сервисными средствами, возможности расширения системы, обеспечение совместимости
Устройство телемеханики должно быть снабжено средствами быстрой индикации и локализации повреждений и самодиагностики оборудования. Как аппаратная часть, так и программное обеспечение должны допускать возможность обслуживания, ремонта и расширения системы, учитывая возможность усовершенствования схем, изменения технологического процесса и методов обслуживания. Организация математического обеспечения должна быть такой, чтобы оперативному персоналу можно было быстро и легко вносить в него изменения при изменениях в энергетической сети.
3.4. Основные различия между системами телемеханики и местными системами управления
Характеристики, отличающие системы телемеханики от местных систем управления, следующие:
использование каналов связи с ограниченной шириной полосы пропускания в условиях высокого уровня помех; требование оптимального соотношения между скоростью и надежностью передачи информации для обеспечения передаваемого количества данных и заданного времени передачи;
проблемы, связанные с высоким уровнем помех из-за большой протяженности каналов связи или сети и в ряде случаев разнотипных каналов связи. Необходимость выбора соответствующего протокола передачи, учитывающего эти обстоятельства. Необходимость гарантии высокой степени достоверности при высоких уровнях помех. Необходимость учета уменьшения скорости передачи информации при увеличении уровня помех;
централизованность управления многочисленными территориально распределенными объектами.
4. СТРУКТУРЫ И КОНФИГУРАЦИИ СИСТЕМ ТЕЛЕМЕХАНИКИ
Структуру системы следует понимать как иерархический порядок ее основных элементов и их взаимодействий, что в совокупности составляет систему и определяет ее характеристики. Конфигурация системы представляет собой определенное расположение телемеханических станций и связей между ними.
4.1. Взаимосвязь между построением технологической сети и конфигурацией системы телемеханики
На стадии проектирования системы телемеханики должна быть выбрана та конфигурация, которая соответствует требованиям пользователей. Структура технологической схемы, например, энергосети с несколькими различными уровнями напряжения, число и территориальное расположение электростанций, центров управления, подстанций, прежде всего определяет структуру каналов связи, которые должны связать между собой эти объекты.
Этот подход может отличаться в разных странах и фирмах как государственных, так и частных.
Основное внимание должно быть обращено на функции контроля, оставляя функции управления частично или полностью местному персоналу подстанций, не предусматривая возможности дальнейшего расширения системы. Полный набор оперативных средств, обеспечивающих выполнение функций контроля и управления, должен быть предусмотрен с самого начала. Даже в относительно простых системах функции контроля и управления могут быть очень сложными, т. к. они должны удовлетворять множеству оперативных требований на каждом иерархическом уровне энергосети. Они должны также удовлетворять требованиям безопасности, установленным правилам и экономическим требованиям. Тенденция к усложнению структуры энергосетей как на уровне фирмы, так и на национальном уровне вызывает усложнение системы управления нагрузкой и, следовательно, усложнение структуры систем телемеханики.
4.2. Основные функциональные модули системы телемеханики, построенной по принципу "пункт-пункт"
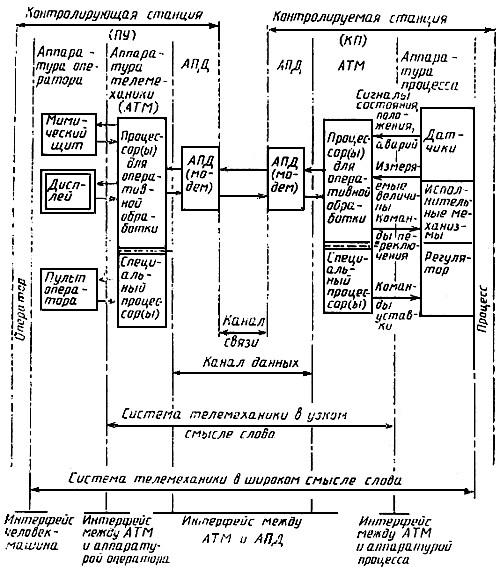
Простая, но типовая структура по принципу "пункт-пункт" с интерфейсом, описанным в ГОСТ Р МЭК 870-3, приведена на черт.2. Этот чертеж служит для описания и разъяснения назначения основных функциональных модулей аппаратуры или подсистем, а именно:
вход-выход процесса;
обработка информации на контролируемой станции (КП);
передача данных;
обработка информации на контролирующей станции (ПУ);
вход-выход оператора.
Типовая структура системы телемеханики (конфигурация пункт-пункт)
______________
* Необязательный интерфейс между процессором (процессорами) аппаратуры телемеханики и специальным процессором или другой аппаратурой обработки данных, например, печатающим устройством.
Примечание. АПД - оконечное устройство передачи данных (модем),
ATM - оконечная аппаратура данных (аппаратура телемеханики).
Черт.2
В табл.1 представлены основные функциональные и аппаратные модули и их функции в системах телемеханики. Местная и специальная обработка как на КП, так и на ПУ может выполняться либо самой аппаратурой телемеханики, либо отдельным оборудованием (дополнительными процессорами или ЭВМ), связанными с аппаратурой телемеханики через шину данных.
Таблица 1
Основные функциональные и аппаратные модули и их типовые функции в системе телемеханики
Основные функциональные модули | Типовые (пользовательские и телемеханические) функции системы | Типовые аппаратные модули |
Вход-выход процесса: | Обеспечение передачи информации: | Аппаратные модули процесса: |
преобразование действительного физического состояния процесса в кодированную информацию (направление контроля); | от датчиков процесса к центральному процессору, например, для суммирования и кодирования измерительных импульсов; | датчики процесса; |
воздействие на процесс (направление управления) | от центрального процессора через преобразователь и воздействующее устройство к процессу | преобразователи, исполнительные контакторы, выключатели, регуляторы |
Специальная обработка телемеханической информации на КП: | Входная и выходная информация процесса: | Модули аппаратуры телемеханики КП: |
обработка процесса по определенным правилам | обнаружение событий при помощи сравнения предшествующего и нового состояний; | центральный процессор; предпроцессор; |
уменьшение (сжатие) данных при необходимости; | жесткая логика; основное устройство памяти; | |
передача команд воздействия на процесс от сравнения точек уставки и значений измеряемых величин | подсистема внутренних шин; | |
Передача данных: | Обеспечение надежной передачи всей информации о процессе: | Аппаратура цепей передачи данных: |
передача последовательных данных между распределенными станциями телемеханической системы | преобразование сигнала и (или) формата; | модемы, стандартизованные МККТТ*; |
Специальная обработка телемеханических данных на ПУ: | Входная и выходная информация процесса: | Модули аппаратуры телемеханики ПУ: |
обработка данных процесса по определенным правилам | вывод (выбор) автоматических команд из информации, получаемой от различных станций системы телемеханики | предпроцессор; |
Вход-выход оператора: | Преобразование данных в информацию, понятную персоналу, и преобразование действий человека в данные: | Аппаратура оператора: |
отображение и регистрация информации; | индикация аварийных сигналов и регистрация состояния включено-выключено; | мимический щит; дисплеи; |
устройства для взаимодействия оператора с процессом; | дискретные и аналоговые измерения; | сигнальные лампы; |
функции контроля и управления; | самописцы, АЦПУ, регистраторы; | |
возможность проверок и диагностики повреждений самой системы телемеханики в процессе работы. | управление функциями аварийной сигнализации; | аналоговые дискретные показывающие приборы; |
_____________
* Международный консультативный комитет по телефонной и телеграфной связи.
4.3. Функциональные модули программного обеспечения
Программное обеспечение систем телемеханики может быть разделено на категории и может содержать типовые функциональные программные модули, приведенные в табл.2.
Таблица 2
Программное обеспечение систем телемеханики
Основное программное обеспечение (не зависит от конкретных условий применения) | Стандартное прикладное программное обеспечение (не зависит от системы) | Специальное программное обеспечение конкретного проекта (зависит от проекта) | База данных (зависит от системы) |
Операционная система; | Каналы связи и межпроцессорная связь: | Специфические функции системы (например, арифметические действия с аналоговыми величинами) | Системные управляющие таблицы; |
Новые разработки обычно связаны со специально разрабатываемым программным обеспечением.
4.4. Конфигурация систем телемеханики
В конфигурацию сети передачи данных входят основные функциональные элементы, перечисленные ниже, которые в совокупности составляют основу для построения всех конфигураций. Детали, касающиеся трафика и методов передачи данных, рассматриваются в разд.6. Устройство телемеханики, расположенное в пункте управления (ПУ), обслуживает, как правило, более одного КП. При этом число линейных терминалов для этих целей может быть более одного (см. черт.2). Число линейных терминалов влияет на организацию передачи данных.
Ниже иллюстрируются различные типы организации передачи данных для телемеханики. При этом используются символы, представленные на черт.3-13.
Главный пункт управления (ЦПУ)
Черт.3

Черт.3
Пункт управления (ПУ), в состав которого входит один или более линейных терминалов (маленькие окружности, введенные в символ, показывают число линейных терминалов на этом пункте управления).
Черт.4

Черт.4
Подстанция, контролируемая станция (пункт), КП; удаленный терминал
Черт.5
![]()
Черт.5
Пункты сбора, концентрации и обмена информации
Черт. 6

Черт. 6
Канал передачи данных
Черт. 7
![]()
Черт. 7
4.4.1. Конфигурация, "пункт-пункт"
Черт. 8
![]()
Черт. 8
Эта конфигурация связывает между собой две телемеханические станции и является простейшей из всех возможных типов конфигураций.
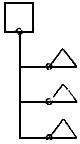
4.4.2. Радиальная конфигурация "один-один" (пункт-пункт)
Черт. 9
Черт. 9
ПУ связан с несколькими КП. При этом на каждом КП находится один линейный терминал. Одновременно все КП могут передавать данные на ПУ, который может передавать сообщения либо одному, либо сразу нескольким КП одновременно.
4.4.3. Многоточечная радиальная конфигурация
Черт. 10
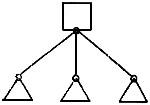
Черт.10
ПУ связан более чем с одним КП одним общим линейным терминалом. Одновременно только один КП может передавать данные на ПУ. Аппаратура телемеханики ПУ может передавать данные одному или нескольким выбранным КП или общие сообщения всем КП одновременно.
4.4 4. Цепочечная конфигурация
Черт. 11
Черт.11
ПУ связан с несколькими КП при помощи общей линии связи. Для данной конфигурации ограничения, налагаемые на обмен информацией между ПК и КП, такие же как и для многоточечной радиальной конфигурации (п.4.4.3).
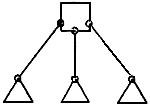
4.4.5. Многоточечная кольцевая конфигурация
Черт. 12
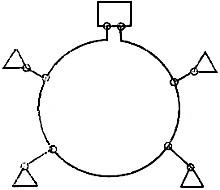
Черт.12
Линия связи, проходящая через все КП, образует кольцо. С точки зрения надежности линии связи этот метод является предпочтительным. Если в какой-либо точке произойдет обрыв линии связи, то остальные связи будут сохранены, поскольку связь с каждым из КП можно осуществить по двум сторонам кольца.
4.4.6. Смешанная конфигурация; радиально-цепочечная
Черт. 13
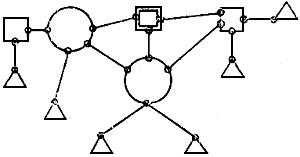
Черт.13
Из конфигурации типов, приведенных в пп.4.4.1-4.4.5, можно получить множество различных смешанных конфигураций. Из них наиболее важными являются конфигурации, для которых необходимым условием является возможность связи между любыми двумя станциями. Пункты сбора, концентрации и обмена информацией могут быть также включены в конфигурацию.
"Многомаршрутность" конфигураций, приведенных в пп.4.4.5 и 4.4.6, увеличивает надежность и готовность системы передачи данных.
5.ФУНКЦИИ СИСТЕМ ТЕЛЕМЕХАНИКИ
5.1. Уровневая структура телемеханических функций
Функции систем передачи данных могут быть подразделены на семь определенных уровней, как в модели, рекомендуемой OSI (ВОС)*, разработанной ИСО. Такое деление на отдельные уровни является теоретической моделью для характеристики стандартов. Каждый уровень независим от выше или ниже расположенных уровней. Ниже расположенный уровень выполняет обслуживающие функции, а выше расположенный является главным (мастер), с которым нижний уровень обменивается данными и сообщает об ошибках. Обычно каждый функциональный уровень сообщается с соответствующим уровнем на другой стороне линии связи.
_____________
* OSI - Open System Interconnection.
ВОС - Взаимодействие открытых систем.
Независимость уровней определяет модульность системы. Можно вносить изменения в один уровень, не меняя других. В особых случаях некоторые уровни можно исключить.
Функции системы телемеханики разделяют на следующие:
пользовательские функции - специальные требования процессора, который использует систему телемеханики; они связаны с информацией, поступающей от процесса или оператора. Эта информация передается к системе телемеханики в виде сигналов и хранится внутри этой системы в форме данных;
функции оперативной обработки, включая функции отображения, - преобразование информации в сигналы и данные в устройстве оперативной обработки;
функции транспортирования - передача информации по сетям, каналам и физическим линиям.
Пользовательские функции и соответствующие функции оперативной обработки приведены в пп.5.2 и 5.4. Стандарты на транспортирование данных, функции сети и линии, а также структуры форматов данных приведены в разд.6 настоящего стандарта и более подробно в последующих разрабатываемых публикациях МЭК на аппаратуру телемеханики.
5 2. Пользовательские функции делятся на две категории:
основные функции;
расширенные функции обработки.
5.2.1. Основные функции относятся ко всем видам передачи информации от процесса к оператору и в обратном направлении.
Информация, содержащаяся в данных, представляющих основные пользовательские функции, должна оставаться неизменной при обработке системой телемеханики (т.е. сохраняется достоверность данных).
Основные подгруппы:
контроль (сбор данных о процессе);
телесигнализация - информация о дискретном состоянии (одно-, двух- и многопозиционном);
телеизмерение - информация о непрерывно меняющихся величинах;
телесчет - состояние интегральных переменных или информация о приращении;
команды и управление (воздействие на процесс);
телеуправление, телепереключение - одно- или двухпозиционные команды, импульсные команды или длительные команды;
телерегулирование и телеуставка - непрерывно или дискретно изменяемые параметры.
5.2.2. Функции расширенной обработки могут выполняться на центральном процессоре системы телемеханики или отдельной ЭВМ.
Типовые примеры:
указание пределов;
автоматический разбор аварий;
указание ошибочных состояний;
указание суммарных величин;
оценка состояния в реальном масштабе времени;
контроль повреждений (процесса и системы телемеханики);
регистрация событий в реальном масштабе времени для последующего анализа;
АРЧМ и экономичное управление нагрузкой;
обеспечение безопасности и анализ;
отображение интегральных измеряемых величин;
краткосрочное планирование режимов;
вероятностная оценка;
автоматический сброс и восстановление нагрузки;
оптимизация соотношения и генерирования мощности тепловыми и гидроэлектростанциями и ввод оборудования.
5.3. Функции оперативной обработки обеспечивают правильное получение данных и соответствующее представление. Типовые функции оперативной обработки следующие:
согласование сигналов входа-выхода на интерфейсах к человеку и процессу;
подавление дребезга контактов (фильтрация);
выявление искаженной информации;
контроль пределов;
контроль достоверности;
сглаживание;
вычисление значений измеряемых величин для последующих инженерных расчетов;
суммирование и другие арифметические операции.
Современная технология позволяет экономично выполнять дополнительные функции оперативной обработки на КП, где данные собираются, и на пунктах концентрации данных. Эта процедура называется предварительной обработкой. Предварительно обработанные данные могут дальше обрабатываться при помощи центрального процессора на ПУ (или отдельной ЭВМ).
Предварительная обработка уменьшает число передаваемых данных и может предотвратить (особенно в критических ситуациях) возможную перегрузку линий связи, центрального процессора и интерфейса человек-машина.
5.4. Представление оператору информации о процессе
Интерфейс человек-машина определяет границу между терминалом системы обработки данных и оператором. Должны быть точно определены типы и формы информации, обмен которой будет вестись между человеком и машиной, а также аппаратура и программное обеспечение, выполняющие этот обмен.
Основным требованием для оптимизации связи человек-машина является обеспечение оператора и обслуживающего персонала достаточной и надежной информацией о действительном состоянии энергосети и системы телемеханики и возможность использования средств центра управления для вмешательства в технологический процесс.
Информация, приведенная в пп.5.2.1 и 5.2.2, обычно отражается у оператора с помощью следующей аппаратуры:
мимический щит - отражает топологическую структуру и текущее состояние энергосети. Для отражения текущего состояния энергосети и запуска управляющих команд используются различные активные и (или) пассивные элементы - индикаторные лампы, многоцелевые индикаторы, кнопки, ключи несоответствия и т.п.;
консоль (пульт) оператора представляет собой комбинацию различных устройств отображения - специальных визуальных дисплеев и коммутаторов, которые обеспечивают оператора детальной информацией и возможностью управления;
показывающие приборы (аналоговые и (или) дискретные) - для индикации как непосредственно измеряемых, так и обобщенных величин (например, сумм аналоговых величин);
визуальные дисплеи - для алфавитно-цифрового отображения информации об аварийных сигналах, измеряемых величинах и другой информации, а также для графического отображения состояния технологической сети и т.п.;
регистрирующие устройства - телетайпы, линейные печатающие устройства, устройства для получения "твердых" копий, графопостроители для регистрации как алфавитно-цифровой, так и графической информации;
звуковая сигнализация - для привлечения внимания оператора к опасным ситуациям;
аппаратура обслуживания - для контроля и технического обслуживания самой системы телемеханики.
6. ПЕРЕДАЧА ТЕЛЕМЕХАНИЧЕСКИХ ДАННЫХ
6.1. Роль стандартов на каналы связи
Стандарты, применяемые в области передачи данных, были изданы международными организациями CCITT (МККТТ)* и ISO (MOC). Эти стандарты характерны тем, что ими охватывается лишь область передачи коммерческих данных (например, передача данных между ЭВМ, предназначенными для решения научных или коммерческих задач, и удаленными терминалами). В качестве каналов связи в этом случае могут использоваться телефонные каналы, арендуемые у телефонной сети, протяженностью от нескольких километров до нескольких сотен километров. Управление данными этого типа обычно соответствует задачам ведомственной автоматики. Форматы и протоколы сообщений отвечают требованиям по времени и достоверности данных для таких функций.
____________
* CCITT - International Telegraph and Telephone Consultative Committee.
MKKTT - международный консультативный комитет по телефонной и телеграфной связи.
Передача телемеханических данных, ведущаяся в реальном масштабе времени, характерная тем, что системы телемеханики непосредственно воздействуют на процесс, требует стандартов с более жесткими характеристиками, а именно:
высокой степенью готовности;
высокой достоверностью данных;
малым временем передачи, позволяющим реагировать на события в реальном масштабе времени;
высокой эффективностью передачи информации;
правильной работой при наличии мощных электромагнитных наводок и разностей потенциалов земли.
Главным препятствием для удовлетворения этих требований является то, что для канала связи с ограниченной полосой пропускания и в условиях помех два требования "высокой достоверности данных" и "малого времени передачи" являются противоречивыми. Поэтому необходимо так стандартизовать методы передачи, чтобы найти компромисс между этими характеристиками.
Для получения высокой надежности часто применяют отраслевые каналы связи - подземные и воздушные кабели, ВЧ каналы по ВЛ и радиорелейные линии.
6.2. Транспортирование данных, сети, каналы связи и физические линии передачи
Функции транспортирования данных - это функции, служащие для надежной и эффективной передачи информации между станциями.
Запрос на передачу сообщений с различными приоритетами, различной длиной, типом протокола и назначения задаются уровнем пользователя на каждой станции.
Соответствующая процедура передачи посылается на нижний уровень протокола, который сообщает на вышестоящие уровни об успешном выполнении или о замеченных ошибках. Автоматическое повторение процедуры вызывается сообщением о динамических кратковременных ошибках, сообщение об ошибках передается на высший уровень после фиксации постоянных ошибок.
Типовые функции, которые выполняются на высших уровнях вместе с более низкими уровнями - "канальным" и "физическим":
организация приоритета для спорадической и циклической передачи информации;
выполнение эксплуатационных и испытательных процедур по запросу (например, вызов каналов, станций или частей системы);
повторение процедуры после обнаружения ошибок;
формирование и контроль кодов, обнаруживающих ошибки;
формирование и контроль синхронизации кадров, квитирование кадров сообщений и обнаружение ошибок в размере кадров;
задание очередности кадров сообщений и расшифровка этой последовательности;
контроль качества сигнала;
преобразование уровней сигналов и форматов данных.
6.3. Характеристики процесса передачи телемеханических данных
6.3.1. Структура сообщений в телемеханике
Основная структура телемеханических сообщений приведена на черт.14 и более детально - в последующих разрабатываемых публикациях МЭК на аппаратуру телемеханики.
Основная структура телемеханического сообщения
Маркер | Организация | Идентификация (опознавание) | Контроль состояния | Контроль | |||||
Маркер начала | Тип сообщения | Тип адреса | Данные пользователя | Защита от ошибок | |||||
Порядковый номер | |||||||||
Описание элементов диалога, например запрос, ответ и т.п. | Источник; получатель | Контрольные биты | |||||||
|
|
| |||||||
| Длина блока | ------------------------------ | |||||||
| Кадр | ------------------------------- | |||||||
Черт.14
Стандартные форматы кадров предусматривают длину информационного поля, которая может изменяться только кратно байтам.
6.3.2. Виды запуска передачи в устройствах телемеханики
Для передачи телемеханических данных используются три основных вида запуска передачи:
передача, запускаемая при изменении состояния (спорадическая).
В этом случае передача начинается при появлении на станции какого-либо события - изменения положения выключателя, изменения значения измеряемых величин и т.п. Этот метод лучше всего удовлетворяет требованиям режима реального масштаба времени. Правильность работы при изменении состояния проверяется посредством периодической передачи тестовой информации (функция "сторожевая собака" - контрольная функция);
передача по запросу.
В этом случае ПУ запрашивает КП для передачи информации о действительном состоянии. В случае нескольких КП этот режим называется также режимом по запросу;
циклическая передача.
Этот режим часто используется для передачи с КП на ПУ измеряемых величин и двоичной информации. При этом измеряемые величины и (или) двоичная информация о состоянии передается с временным разделением. Циклическая передача приводит к временным задержкам обновления информации, которые увеличиваются по мере роста количества информации, опрашиваемой за один цикл. Канал связи в этом случае требуется только в направлении потока информации.
Передачи по изменению состояния и по запросу, когда данные передаются только один раз, требуют высокой достоверности данных. При циклическом режиме обновления информации, когда случайная ложная информация исправляется в течение следующего цикла опроса, допустим меньший класс достоверности данных.
6.3 3. Комбинации различных видов запуска передачи и диалоговых процедур
Конфигурация линии связи, вид запуска передачи и типы трафика не зависят друг от друга и теоретически имеется множество их комбинаций. Число практических решений ограничено из-за ряда соображений технического и экономического характера.
Комбинации видов запуска передачи следующие:
спорадическая передача и передача по запросу. Запрос информации о состоянии с одного или более КП или группы измеряемых величин и (или) одноэлементная или двухэлементная информация о состоянии опрашивается в течение требуемого промежутка времени;
спорадическая и циклическая передача. При необходимости циклическая передача может быть прервана, далее проходит спорадическая передача, имеющая более высокий приоритет. Периодически передаваемые тестовые данные выполняют также контрольную функцию;
комбинация трех видов запуска передачи со следующим порядком приоритетов:
1 - спорадическая передача;
2 - передача по запросу (вызову);
3 - циклическая передача.
Для различных конфигураций сети должны быть учтены следующие моменты:
многоточечная конфигурация, построенная по принципу "пункт-пункт", может быть разбита на эквивалентное число участков "пункт-пункт", каждый из которых имеет независимые линейные терминалы с обоих концов. Все три вида запуска передачи и их комбинации могут для каждого из этих участков применяться индивидуально. Поток информации, передаваемой с ![]() КП, будет ограничен пропускной способностью центрального процессора системы, а не емкостью отдельных линейных терминалов.
КП, будет ограничен пропускной способностью центрального процессора системы, а не емкостью отдельных линейных терминалов.
Причиной ограничения величины потока информации, особенно для каналов с циклической передачей, является обязательное введение приоритетов передачи.
В таких многоточечных конфигурациях, как звездная и цепочечная, возможная скорость передачи с ![]() КП меньше в
КП меньше в ![]() раз для каждого КП.
раз для каждого КП.
Дальнейшие ограничения зависят от выбора комбинаций трех видов запуска передачи и от установленных ее приоритетов. Стратегии управления информацией, используемые в многоточечных конфигурациях, подобны стратегиям, используемым в системах шин с последовательной побитной передачей. Системы шин смогут работать в различных режимах запуска передачи и поэтому требуют сложных средств управления передачей данных.
В аварийных ситуациях при запуске передачи при изменении состояния (спорадической передаче) количество информации, передаваемой одним или всеми КП, может внезапно резко возрасти за короткий промежуток времени (в течение 1-2 с количество передаваемой информации может увеличиваться на порядок). Конфигурация, состоящая из отдельных звеньев "пункт-пункт", оказывается в аварийных ситуациях более гибкой, чем другие многоточечные конфигурации.
6.4. Типы трафика в каналах связи
Типы трафика определяют процессы передачи данных по каналам связи, направление и хронологическую последовательность использования этих каналов.
6.4.1. Симплексный трафик
Симплексный трафик (односторонний) может использоваться для работы в режиме циклического обновления информации в системах телесигнализации с простой (пункт-пункт) или многоточечной конфигурацией, а также в системах с выбором канала.
6.4.2. Полудуплексный трафик
Полудуплексный трафик характеризуется наличием только одного канала связи общего для обоих направлений, что делает невозможной одновременную передачу в обоих направлениях. По сравнению с симплексной передачей следует усилить защиту от потери информации введением соответствующих диалоговых процедур.
6.4.3. Дуплексный трафик
В этом случае для одновременной передачи сообщений в обоих направлениях используются независимые каналы связи, образующие четырехпроводную линию связи.
6.5. Системы связи для телемеханики
В настоящем стандарте характеристики систем связи упоминаются постольку, поскольку они являются подсистемой, служащей для передачи данных в системе телемеханики.
Передача телемеханических данных в большинстве стран ведется по каналам, полностью или частично внутриведомственным. Используются также каналы, арендуемые у телефонных станций.
Каналы связи обеспечивают следующие возможности внутреннего использования:
ведомственную телефонную связь;
телетайп, факсимильную связь*;
____________
* Передача изображений.
передачу телемеханических данных;
телезащиту;
промышленное телевидение.
Частично используются существующие стандарты (МККТТ, АОО** (ЕIА) и др.), удовлетворяющие требованиям систем телемеханики.
______________
** EIA - Electronic Industries Association.
АОО - Ассоциация по оборудованию обмена.
6.5.1. Средства передачи
Используются следующие средства передачи:
радиоканалы (УВЧ, СВЧ);
радиорелейные каналы "пункт-пункт";
ВЧ каналы по ВЛ;
кабели связи с заземленной оплеткой; |
|
| многожильные, |
Средства передачи образуют более или менее полную сеть связи. Скорости передачи данных систем телемеханики находятся в пределах от 50 до 2400 бит/с. Скорости 4800 и 9600 бит/с используются реже. Для скоростей передачи свыше 9600 бит/с требуются специальные широкополосные каналы, которые используют стандартную технику на различных каналах связи.
6.5.2. Методы передачи
Системы телемеханики используют исключительно бит последовательные двоичные форматы. Физическое представление информационных единиц (бит) на пути передачи зависит от используемого средства передачи, ширины его полосы пропускания и других условий.
Наиболее употребительными методами передачи являются следующие:
импульсно-кодовая модуляция (ИКМ), при которой двоичная информация представляется двумя различными уровнями сигнала фиксированной длительности в случае передачи на короткие расстояния по кабелю или двумя различными частотами равной длительности в случае более далеких расстояний или других каналов связи. При низких скоростях передачи (до 1200 бит/с) используются обычные каналы "со сдвигом частоты", которые преобразуют два различных уровня сигнала в два значения частоты. Для более высоких скоростей передачи применяются различные методы многоуровневой модуляции, в которых, кроме двоичной информации, передается информация "сигнал тактовой частоты" и другая информация для контроля данных;
дискретная широтно-импульсная модуляция (ДШИМ), при которой двоичная информация представляется импульсами с различными значениями длительности. Число передаваемых импульсов и интервалов между ними соответствует числу передаваемых бит. Так же как и при ИКМ могут использоваться каналы со сдвигом частоты и различные модемы.
6.6. Защита сообщений от помех в канале связи
Для передачи телемеханических данных и поддержания их достоверности представляют интерес следующие характеристики конкретных каналов связи:
ширина полосы пропускания на канал;
заданное значение отношения сигнал-шум для нормальных окружающих условий и наиболее низкое отношение сигнал-шум при наличии помех пакетного типа;
затухание (дБ/км) и изменение этой величины при различного рода внешних воздействиях (погода, гололед и т.п.);
временные задержки при передаче (мс/100 км).
Для каналов связи, перечисленных выше, эти характеристики весьма различны и зависят от конкретного типа средств передачи.
Для радиорелейных каналов практически отсутствуют помехи пакетного типа, вызванные работой выключателей и разъединителей, но изменения затухания в атмосфере могут оказаться существенными и должны быть компенсированы разносом частот. Для ВЧ каналов по ВЛ при кратковременных помехах пакетного типа характерно плохое отношение сигнал-шум, но километрическое затухание мало, что позволяет увеличить расстояние между ретрансляторами.
6.6.1. Защита информации от искажений
На всех уровнях системы телемеханики для уменьшения возможности искажения информации принимаются различные меры.
Примеры типовых мер следующие:
улучшение отношения сигнал-шум. Пассивные методы включают экранирование коаксиальных кабелей, правильный выбор несущих и поднесущих частот. Активные методы - увеличение мощности передатчика и т.п.;
максимальное снижение числа остаточных, необнаруженных ошибок в каналах связи может быть получено применением избыточного кодирования и контроля качества сигнала (амплитуды импульса, искажения сигнала). После обнаружения ошибки выдача искаженной информации должна быть исключена;
использование проверки правдоподобия, оценки состояния, расширенных процедур передачи информации ("проверка перед исполнением" при передаче команд).
6.6.2. Защита от потерь информации
Спорадические системы телемеханики могут потерять информацию, если последняя подавляется (выбрасывается) после обнаружения ошибки при передаче Этого можно избежать различными методами:
решающая обратная связь.
Например, используется положительное квитирование и автоматическая повторная передача, если сигнал квитирования не поступает;
информационная обратная связь.
Этот метод coчетает обнаружение ошибок с защитой от потерь информации. При этом производится контроль идентичности информации, переданной и принятой обратно на передающей станции;
обеспечение последовательности номеров последующих форматов сообщений.