ГОСТ Р 51960-2002
(ИСО 789-11:1996)
Группа Д29
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТРАКТОРЫ СЕЛЬСКОХОЗЯЙСТВЕННЫЕ КОЛЕСНЫЕ
Метод оценки управляемости
Agricultural wheeled tractors. Steering capability test procedure
ОКС 65.060.10
ОКП 47 9136
Дата введения 2004-01-01
Предисловие
1 РАЗРАБОТАН И ВНЕСЕН Техническим комитетом по стандартизации ТК 275 "Тракторы"
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 27 ноября 2002 г. N 431-ст
3 Настоящий стандарт представляет собой идентичный текст международного стандарта ИСО 789-11:1996 "Тракторы сельскохозяйственные. Методы испытаний. Часть 11. Характеристики управляемости колесных тракторов" и содержит дополнительные требования, отражающие потребности экономики страны, выделенные курсивом
4 ВВЕДЕН ВПЕРВЫЕ
1 Область применения
1 Область применения
Настоящий стандарт распространяется на сельскохозяйственные колесные тракторы и устанавливает метод оценки их управляемости.
Требования стандарта являются обязательными, за исключением 5.2.3 и приложения А.
2 Нормативные ссылки
В настоящем стандарте использована ссылка на ГОСТ Р 51961-2002 (ИСО 10998:1995) Тракторы сельскохозяйственные колесные. Требования к рулевому управлению
3 Определения
В настоящем стандарте применяют следующие термины с соответствующими определениями:
3.1 усилие управления на рулевом колесе: Сила сопротивления перемещению рулевого колеса при воздействии на него оператора для изменения направления движения трактора (ГОСТ Р 51961).
3.2 управляемость трактора: Свойство трактора реагировать на действия оператора, направленные на сохранение или изменение направления движения.
4 Средства измерений, измеряемые показатели, допускаемые погрешности измерений
4.1 Средства измерений
Рулетка.
Динамометр.
Секундомер.
Манометр.
4.2 Измеряемые показатели и допускаемые погрешности измерений
Время - ±0,2 с.
Расстояние, м - ±0,5%.
Усилие, Н - ±1%.
Масса, кг - ±0,5%.
Давление, кПа - ±2%.
5 Требования к испытательной площадке и испытуемому трактору
5.1 Требования к испытательной площадке
5.1.1 Размер площадки должен обеспечивать выполнение трактором заданного движения по траекториям, сопрягаемым с окружностями радиусом 12 м, приведенным на рисунках 1 и 2.
Рисунок 1 - Траектории движения трактора с исправным рулевым управлением (время движения - 5 с)
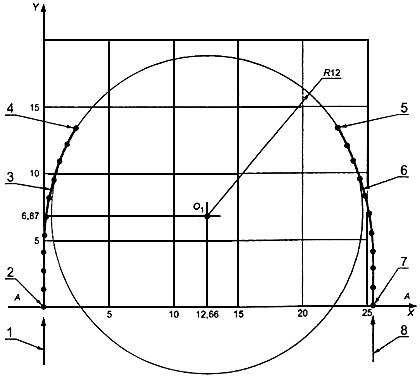
1, 8 - направление движения трактора перед выездом на траекторию;
2, 7 - стартовые точки движения по траекториям; 3 - траектория поворота трактора направо;
4, 5 - финишные точки движения по траекториям; 6 - траектория поворота трактора налево;
![]() - стартовая линия
- стартовая линия
Рисунок 1 - Траектории движения трактора с исправным рулевым управлением (время движения - 5 с)
Рисунок 2 - Траектории движения трактора с рулевым управлением в аварийном состоянии (время движения - 8 с)
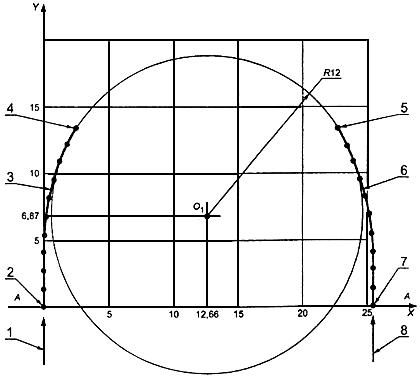
1, 8 - направление движения трактора перед выездом на траекторию;
2, 7 - стартовые точки движения по траекториям; 3 - траектория поворота трактора направо;
4, 5 - финишные точки движения по траекториям; 6 - траектория поворота трактора налево; ![]() - стартовая линия
- стартовая линия
Рисунок 2 - Траектории движения трактора с рулевым управлением в аварийном состоянии (время движения - 8 с)