ГОСТ 28854-90
Группа П01
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ИНТЕРФЕЙС ПОСЛЕДОВАТЕЛЬНЫЙ РАДИАЛЬНОГО ТИПА
ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ
РАССРЕДОТОЧЕННЫМИ ОБЪЕКТАМИ
Общие технические требования
Interface of serial radial type for dispersed object automated control systems.
General technical requirements
МКС 35.200
ОКП 42 0000
Дата введения 1992-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством электротехнической промышленности и приборостроения СССР
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 29.12.90 N 3641
3. ВВЕДЕН ВПЕРВЫЕ
4. ПЕРЕИЗДАНИЕ. Ноябрь 2004 г.
Настоящий стандарт распространяется на последовательный интерфейс радиального типа для автоматизированных систем управления технологическими процессами рассредоточенных объектов, предназначенный для сопряжения приборов, блоков и комплексов (устройств), а также ПЭВМ при дуплексной, полудуплексной или симплексной организации связи на физическом уровне.
Стандарт устанавливает состав и назначение цепей связи интерфейса, структуру соединения устройств, требования к функциональным и электрическим характеристикам, а также процедуру обмена информацией между сопрягаемыми устройствами.
Стандарт устанавливает обязательные требования по пп.1.1, 1.2, 2.2, 3.1, 3.1.1, 3.1.2, 3.2, 3.4, 3.5, 3.7, 3.8, 4.1, 4.3, 4.3.1-4.3.3.
1. ОБЩИЕ ПОЛОЖЕНИЯ
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Интерфейс является унифицированной системой связей между двумя устройствами, имеющими тип соединения "точка-точка".
1.2. Интерфейс обеспечивает бит-последовательную асинхронную передачу данных по раздельным однонаправленным цепям приема и передачи.
1.3. В процедуре передачи данных при полудуплексной и симплексной организации связи одно из устройств должно иметь статус главного, второе - статус подчиненного. При дуплексном способе оба устройства могут иметь одинаковый статус.
1.4. Обмен информацией должен выполняться во время сеансов связи, организуемых по инициативе главного устройства.
При дуплексном способе организации связи сеанс связи может быть организован по инициативе любого из сопряженных устройств.
1.5. В процессе передачи данных устройство, осуществляющее прием данных, является приемником, а устройство, осуществляющее передачу данных, - источником.
При дуплексном способе организации связи оба сопряженных устройства являются одновременно и источниками, и приемниками.
При полудуплексном способе организации связи главное устройство в начале сеанса связи является источником, а затем приемником; подчиненное устройство в начале сеанса связи является приемником, а затем - источником.
При симплексном способе организации связи главное устройство является источником, а подчиненное - приемником.
2. ЦЕПИ ВЗАИМОСВЯЗИ ИНТЕРФЕЙСА
2.1. Цепи взаимосвязи подразделяют на цепи передачи данных и цепи управления передачей данных. Состав цепей взаимосвязи выбирают в каждом конкретном случае в зависимости от способа организации связи (дуплексный, полудуплексный, симплексный) и структуры программно-аппаратных средств для реализации протокола обмена.
2.2. Назначение, наименование и обозначение цепей взаимосвязи интерфейса приведены в табл.1.
Таблица 1
Назначение цепи | Наименование цепи | Обозначение цепи |
1. Цепи передачи данных | ||
Передача данных от главного устройства подчиненному | Передача данных | ПД |
Передача данных от подчиненного устройства главному | Прием данных | ПрД |
2. Цепи управления передачей данных | ||
Запрос подчиненному устройству передать данные главному устройству | Запрос передачи | ЗП |
Готовность данных подчиненного устройства к передаче главному | Готов к передаче | ГП |
Готовность подчиненного устройства к приему данных | Готов к приему | ГПр |
Наименование цепей взаимосвязи принимается относительно главного устройства.
2.3. Блок-схема соединения устройств посредством полного набора цепей взаимосвязи приведена на черт.1.
Черт.1. Блок-схема соединения устройств посредством полного набора цепей взаимосвязи
Главное устройство Подчиненное устройство
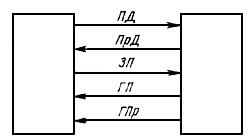
Черт.1
3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
3.1. Интерфейс должен обеспечивать передачу по цепям взаимосвязи электрических сигналов взаимодействия, представляемых постоянным током или уровнем напряжений.
3.1.1. При представлении сигналов взаимодействия постоянным током цепи взаимосвязи интерфейса состоят из двух линий связи, образующих токовую петлю. Каждая линия связи имеет обозначение соответствующей цепи взаимосвязи с указанием знаков "+" или "-" направления тока в ней.
Например, цепь взаимосвязи ПД состоит из линий связи "ПД +" (выходной ток) и "ПД -" (входной ток). Направление выходного тока "+" совпадает с направлением сигнала в цепи взаимосвязи на черт.1.
Состоянию логической "1" в цепи взаимосвязи должен соответствовать ток от 15 до 25 мА (20 мА токовая петля), состоянию логического "0" - от 0 до 3 мА.
3.1.2. При передаче сигналов уровнями напряжений состоянию логическая "1" должно соответствовать напряжение от минус 3 В до минус 15 В, состоянию логический "0" - от плюс 3 В до плюс 15 В. Напряжение измеряют относительно общей точки источника напряжения.
3.2. Скорость приема-передачи по каналу передачи информации (КПИ) должна выбираться из ряда: 38400, 19200, 9600, 4800, 2400, 1200 бод. Максимальное расстояние при скорости передачи 38400 бод - 120 м. Допускается передача на большие расстояния при пропорциональном уменьшении скорости.
3.3. Каждая цепь взаимосвязи должна быть реализована так, чтобы она питалась током со стороны источника. При передаче сигналов, представленных уровнями напряжений, допускается питание со стороны приемника.
3.4. Цепи взаимосвязи сопрягаемых устройств не должны быть связаны гальванически. Значение испытательного напряжения при проверке электрической прочности изоляции между этими цепями должно быть не менее 500 В.
3.5. Отключение нагрузки, короткое замыкание линии связи между собой и любой из них на землю, а также длительная нагрузка максимально допустимым током не должны приводить к повреждению схем интерфейсных узлов, обеспечивающих прием и передачу сигналов по цепям взаимосвязи.
3.6. При передаче сигналов постоянным током падение напряжения, измеренное между входами приемника при логическом состоянии "1" в цепи взаимосвязи, должно быть не более 2,5 В.
3.7. Интерфейсные узлы устройств приема должны обеспечивать устойчивый прием из цепей взаимосвязи сигналов, имеющих крутизну фронтов от 0% до 40% ширины импульсов.
3.8. Сигналы взаимосвязи должны приближаться к прямоугольной форме.
Крутизна фронтов сигналов, измеренная на выходах "ПД +", "ПД -" устройства, нагруженного на эквивалент нагрузки, должна быть не более 5 мкс.
Искажение ширины импульсов, измеряемое на выходных зажимах передатчика, нагруженного на эквивалент нагрузки, должно быть не более 5%.
В качестве эквивалента нагрузки применяют параллельно соединенные сопротивления 100 Ом и емкость 10 пФ.
4. ЛОГИЧЕСКАЯ ОРГАНИЗАЦИЯ ИНТЕРФЕЙСА
4.1. Обмен информацией должен производиться путем передачи по цепям взаимосвязи ПД, ПрД стартстопных цифровых сигналов данных при соответствующих состояниях цепей взаимосвязи ЗП, ГП, ГПр. Формат стартстопного цифрового сигнала данных должен соответствовать приведенному на черт.2.
Черт.2. Формат стартстопного цифрового сигнала
![]()
СТА - стартовый бит, равный одному единичному элементу цифрового сигнала;
ДО ... ДN - кодовая комбинация данных, равная 5, 7 или 8 единичных элементов
цифрового сигнала; ПР - паритет (контроль на четность или нечетность) или без паритета;
СТО - стоповый бит, равный 1, 1,5 или 2 единичным элементам цифрового сигнала
Черт.2
4.2. Для полудуплексной или дуплексной связи обязательными являются цепи взаимосвязи ПД и ПрД, для симплексной - только ПД или ПрД. Цепи ЗП, ГП, ГПр не являются обязательными, и их применение определяется пользователем.
4.3. При использовании необязательных цепей взаимосвязи необходимо соблюдать следующие условия.
4.3.1. Сигнал ЗП должен выдаваться главным устройством как команда подчиненному устройству выдать данные в цепь взаимосвязи ПрД.
Сигнал ЗП должен выдаваться главным устройством только при наличии состояния "логическая 1" в цепи взаимосвязи ГП.
4.3.2. Подчиненное устройство должно устанавливать цепь взаимосвязи ГП в состояние "логическая 1" каждый раз, когда буфер передачи заполнен. Установка цепи взаимосвязи ГП в состояние "логический 0" должна осуществляться только после передачи всего буфера.
4.3.3. Цепь взаимосвязи ГПр должна приводиться в состояние "логическая 1" при свободном входном буфере подчиненного устройства. Установка цепи ГПр в состояние "логический 0" производится после заполнения приемного буфера.
4.4. В случае неиспользования дополнительных цепей или частичного их использования процедура установления связи, опрос готовности и т.д. должны реализовываться логическим протоколом посредством передачи по цепям взаимосвязи ПД, ПрД цифровых сигналов, описывающих соответствующие команды и состояния.
4.5. В качестве примера одного из возможных способов организации связи в приложении приведен протокол обмена для полудуплексной связи с программным присвоением статуса.
5. ТРЕБОВАНИЯ К ФИЗИЧЕСКОЙ РЕАЛИЗАЦИИ
5.1. Физический интерфейс реализуется в виде интерфейсных узлов, входящих в состав сопрягаемых устройств, и электрических линий связи.
5.2. Интерфейсные узлы должны содержать схемы приема-передачи, соответствующие требованиям разд.3.
5.3. Пример сопряжения главного и подчиненного устройства, использующих полную номенклатуру цепей взаимосвязи, приведен на черт.3.
Черт.3. Сопряжение главного и подчиненного устройства, использующих полную номенклатуру цепей взаимосвязи
Главное устройство Подчиненное устройство
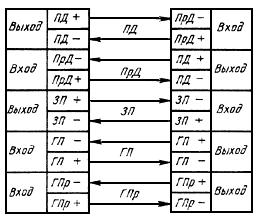
Черт.3
Примечание. При передаче сигналов, представленных напряжением, допускается объединение обратных линий связи в одну.
5.4. Цепи взаимосвязи должны выполняться в виде витых пар с шагом скрутки не более 70 мм. Допускается также использование выделенных пар в многожильных телефонных кабелях.
Применяемый кабель по своим характеристикам должен удовлетворять условиям, определенным в разд.3.
ПРИЛОЖЕНИЕ (рекомендуемое). Протокол обмена для полудуплексной связи с программным присвоением статуса
ПРИЛОЖЕНИЕ
Рекомендуемое
1. Настоящий протокол может быть рекомендован для организации обмена данными между двумя устройствами, каждое из которых может являться инициатором связи. Протокол ориентирован на использование цепей взаимосвязи ПД, ПрД, образующих канал передачи информации (КПИ). Дополнительные цепи управления обменом данных не используются.
2. Взаимодействие устройств обеспечивается посредством передачи по КПИ ограниченного набора управляющих символов. Номенклатура управляющих символов и их назначение приведены в табл.2.
Таблица 2
Обозначение символа | Наименование и назначение |
AP1 | Авторегистр 1 (символ расширения). Самостоятельного смысла не имеет, применяется для организации управляющих последовательностей и кодонезависимого режима передачи |
КТМ | Запрос "Кто там?" |
ДА | Положительное подтверждение |
НЕТ | Отрицание |
НТ | Начало текста |
КТ | Конец текста |
КП | Конец передачи |
3. Управляющие символы объединяются в управляющие последовательности, обеспечивающие выполнение устройствами соответствующих интерфейсных функций, предусмотренных процедурой обмена.
Для обеспечения кодонезависимого режима каждая управляющая последовательность начинается с символа AP1.
Управляющая последовательность AP1 КТМ посылается устройством при необходимости организации сеанса связи.
Управляющая последовательность AP1 ДА является ответной и посылается как положительное подтверждение на выполнение предписанной функции.
Управляющая последовательность AP1 НЕТ является ответной и посылается как отрицательный ответ на принятую управляющую последовательность или невыполнение предписанной функции.
Управляющая последовательность AP1 НТ используется при передаче сообщений, содержащих байты данных, и указывает, что следующий за ней стартстопный цифровой сигнал является первым байтом передаваемого массива данных (текста).
Управляющая последовательность AP1 КТ передается после передачи последнего байта данных в сообщении и означает, что массив данных в текущем сеансе передан полностью.
Управляющая последовательность AP1 КП передается устройством как команда окончания связи и перехода в нейтральное состояние.
3.1. Управляющие последовательности и байты данных в составе сообщения передаются в соответствии с форматом, приведенным на черт.4.
Черт.4. Управляющая последовательность и байты данных в составе сообщения
![]()
ТКС - текстовая часть сообщения, содержащая байты данных; ПП - последовательность проверки
Черт.4
3.2. Для обеспечения кодонезависимой передачи используется дополнительный символ AP1. При наличии в текстовой части байта данных с кодом, совпадающим с AP1, к нему при передаче добавляется еще один символ AP1. Наличие последовательности AP1 AP1 означает, что данная последовательность не является управляющей и один из символов должен быть принят как байт данных, а второй исключен.
3.3. Последовательность проверки ПП представляет собой контрольную сумму переданных информационных байтов в составе ТКС. Дополнительные символы AP1 в состав контрольной суммы не включаются.
4. Организация обмена информацией
4.1. Обмен информацией осуществляется в соответствии с процедурой управления КПИ, которая может быть представлена в виде двух последовательных фаз:
- фазы установления связи (ФУ);
- фазы передачи сообщения (ФП).
До начала процедуры обмена информацией оба сопряженных по данному интерфейсу устройства - передающее и принимающее - находятся в нейтральном состоянии, т.е. в состоянии, в которое приходят устройства после включения электрического питания и завершения внутреннего тестирования.
В фазе ФУ выполняется приведение обоих сопряженных устройств в активное состояние и присвоение им статусов главного (передающего) или подчиненного (принимающего).
В фазе ФП выполняется передача текста сообщения (массива данных) от главного устройства к подчиненному.
4.2. Последовательность операций ФУ (блок-схема алгоритма) приведена на черт.5.
Черт.5. Блок-схема алгоритма обмена данными в фазе установления связи (ФУ)
Блок-схема алгоритма обмена данными в фазе установления связи (ФУ)
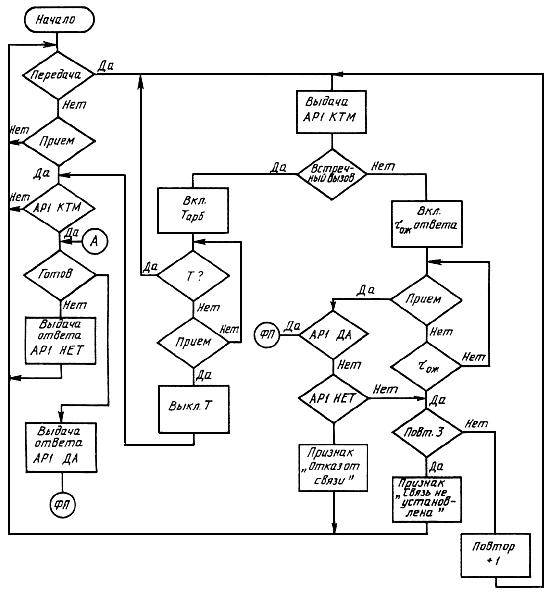
Черт.5
4.2.1. В нейтральном состоянии устройство постоянно контролирует состояние признака (флага) "Передача" и состояние КПИ. При инициализации признака "Прием" устройство должно принять из КПИ управляющую последовательность AP1 КTM.
Если приняты коды, отличающиеся от кода указанной последовательности, устройство их игнорирует и продолжает сканирование флагов "Передача" и "Прием".
4.2.2. Если управляющая последовательность AP1 КTM устройством опознана, то оно должно проанализировать состояние приемных буферов и результаты тестирования, после чего выдать в КПИ одну из последовательностей: AP1 ДА (при готовности к приему) или AP1 НЕТ (при неготовности к приему).
Если выдается последовательность AP1 НЕТ, то после ее выдачи устройство возвращается в цикл контроля состояния флагов "Передача" и "Прием" (нейтральное состояние).
Если устройство выдает в КПИ управляющую последовательность AP1 ДА, то оно принимает статус подчиненного и переходит в фазу ФП как принимающее.
4.2.3. При переходе устройства в активное состояние в связи с необходимостью передачи данных (установлен флаг "Передача") оно выдает в КПИ управляющую последовательность AP1 КTM.
После выдачи AP1 КTM устройство контролирует, не выполнялся ли одновременно с выдачей прием от сопряженного с ним устройства ("Встречный вызов").
Если такая операция не была зафиксирована, устройство включает контрольный отсчет времени ("Вкл. ![]() ответа") и устанавливает режим ожидания приема из КПИ.
ответа") и устанавливает режим ожидания приема из КПИ.
4.2.4. При получении из КПИ управляющей последовательности AP1 ДА устройству присваивается статус главного, и оно переходит в фазу ФП в ранге передающего.
Если из КПИ принята управляющая последовательность AP1 НЕТ, устройство устанавливает флаг "Отказ от связи" и возвращается в нейтральное состояние.
В случае, если принятая управляющая последовательность не является ни AP1 ДА, ни AP1 НЕТ, устройство повторяет выдачу вызова AP1 КTM.
Устройство выполняет не более трех попыток подряд для установления связи.
Если в результате трех попыток связи ответная управляющая последовательность не опознана, устройство устанавливает флаг "Связь не установлена" и возвращается в нейтральное состояние. Аналогичные действия выполняются и при отсутствии ответной управляющей последовательности из КПИ по истечении интервала времени ![]() .
.
4.2.5. Если во время выдачи управляющей последовательности AP1 КTM устройство зафиксировало прием из КПИ (встречную инициативу), то оно приступает к разрешению конфликтной ситуации, для чего включает таймер приоритетного интервала ![]() и устанавливает режим ожидания.
и устанавливает режим ожидания.
Таймеры устройств настроены на разные длительности, причем устройство, имеющее более высокий приоритет, имеет меньшую длительность временного интервала ![]() . В режиме ожидания устройство постоянно контролирует прием информации из КПИ.
. В режиме ожидания устройство постоянно контролирует прием информации из КПИ.
При фиксации приема из КПИ до окончания собственного интервала ![]() устройство отключает свой таймер и переходит к анализу принятой управляющей последовательности.
устройство отключает свой таймер и переходит к анализу принятой управляющей последовательности.
Если в течение собственного временного интервала ![]() AP1 КTM не получена, т.е. данное устройство имеет меньший интервал времени, то оно повторно выдает AP1 КTM и повторяет процедуру установления связи.
AP1 КTM не получена, т.е. данное устройство имеет меньший интервал времени, то оно повторно выдает AP1 КTM и повторяет процедуру установления связи.
4.3. Блок-схема алгоритма ФП главного (передающего) устройства приведена на черт.6.
Черт.6. Блок-схема алгоритма обмена данными в фазе передачи (ФП) главного устройства
Блок-схема алгоритма обмена данными в фазе передачи (ФП) главного устройства
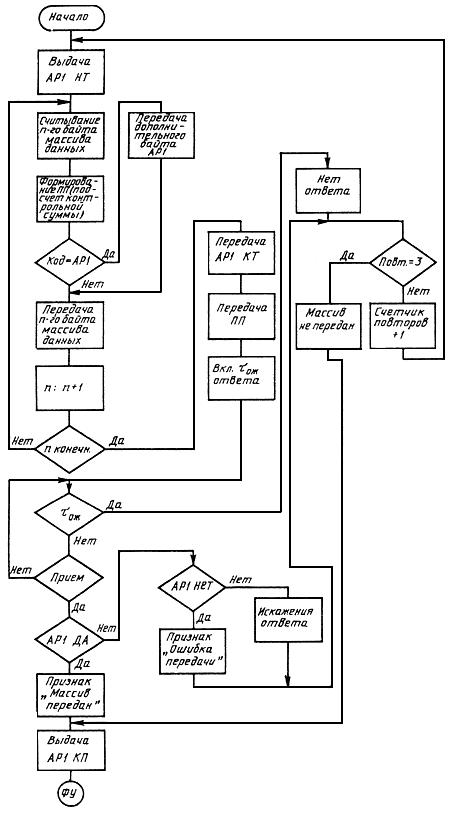
Черт.6
В фазе ФП главное устройство выдает в КПИ управляющую последовательность AP1 HT, означающую, что следующий за ней байт является первым информационным байтом текста - массива данных.
Количество передаваемых информационных байтов подсчитывается передающим устройством и сравнивается с заданной длиной массива.
4.3.1. Устройство обеспечивает прозрачность передаваемой информации посредством байтстаффинга. Для этого оно анализирует код каждого передаваемого байта информации на совпадение его с кодом AP1. В случае совпадения кода информационного байта с AP1 устройство выдает дополнительный байт с кодом AP1, а затем приступает к передаче следующего байта массива данных. Дополнительный байт с кодом AP1 не учитывается при подсчете длины массива и подсчете контрольной суммы.
4.3.2. После завершения передачи ![]() -байтов, составляющих массив данных, устройство выдает управляющую последовательность AP1 КТ и затем ПП, представляющую собой подсчитанную контрольную сумму.
-байтов, составляющих массив данных, устройство выдает управляющую последовательность AP1 КТ и затем ПП, представляющую собой подсчитанную контрольную сумму.
Выдав ПП, передающее устройство включает контрольный временной интервал ожидания ответа ![]() от принимающего устройства и устанавливается в режим приема из КПИ ("Вкл.
от принимающего устройства и устанавливается в режим приема из КПИ ("Вкл. ![]() ответа").
ответа").
Если устройство фиксирует прием до окончания временного интервала ![]() , то оно прекращает отсчет времени и анализирует принятую управляющую последовательность.
, то оно прекращает отсчет времени и анализирует принятую управляющую последовательность.
4.3.3. Если принятая управляющая последовательность опознана передающим устройством как AP1 ДА (переданная информация воспринята принимающим устройством без ошибок), то передающее устройство устанавливает флаг "Массив передан", передает в КПИ управляющую последовательность AP1 КП и переходит в исходное состояние.
4.3.4. В случае получения управляющей последовательности AP1 НЕТ НЕТ, которая передается принимающим устройством при несовпадении принятой ПП с результатом собственного вычисления контрольной суммы, передающее устройство устанавливает флаг "Ошибка передачи" и повторяет передачу массива. Максимальное количество повторений передачи - не более трех.
Если в результате трехкратной передачи ответная управляющая последовательность AP1 ДА не принята, то передающее устройство устанавливает флаг "Массив не передан", выдает в КПИ AP1 КП и переходит в исходное состояние.
Если принятая управляющая последовательность не опознана, передающее устройство устанавливает признак "Искажение ответа" и выполняет повторную передачу. Количество повторов - не более трех.
После третьей попытки устройство устанавливает признак "Массив не передан", выдает АР1 КП и переходит в исходное состояние.
4.3.5. При отсутствии приема до конца временного интервала ![]() передающее устройство устанавливает признак "Нет ответа" и выполняет повторную передачу. Повторы выполняются аналогично вышеприведенному описанию.
передающее устройство устанавливает признак "Нет ответа" и выполняет повторную передачу. Повторы выполняются аналогично вышеприведенному описанию.
4.4. Блок-схема алгоритма ФП подчиненного (принимающего) устройства приведена на черт.7.
Черт.7. Блок-схема алгоритма обмена данными в фазе передаче (ФП) подчиненного устройства
Блок-схема алгоритма обмена данными в фазе передаче (ФП) подчиненного устройства
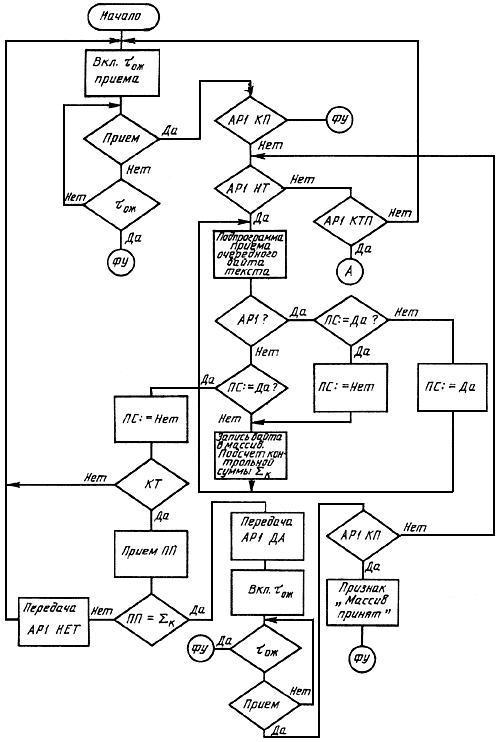
Черт.7
4.4.1. При переходе в фазу ФП принимающее устройство включает интервал ![]() (ожидание приема) из КПИ. Если в течение
(ожидание приема) из КПИ. Если в течение ![]() прием из КПИ не зафиксирован, то принимающее устройство возвращается в исходное состояние (ФУ).
прием из КПИ не зафиксирован, то принимающее устройство возвращается в исходное состояние (ФУ).
4.4.2. Если до окончания ![]() прием из КПИ был зафиксирован, то устройство должно выключить контрольный интервал
прием из КПИ был зафиксирован, то устройство должно выключить контрольный интервал ![]() и сравнить принятую управляющую последовательность с AP1 КП. В случае их соответствия принимающее устройство безусловно переходит в исходное состояние (ФУ). Если принятая управляющая последовательность не совпадает с AP1 КП, она сравнивается с кодом AP1 HT. Если фиксируется несовпадение, то выполняется сравнение с AP1 КTM.
и сравнить принятую управляющую последовательность с AP1 КП. В случае их соответствия принимающее устройство безусловно переходит в исходное состояние (ФУ). Если принятая управляющая последовательность не совпадает с AP1 КП, она сравнивается с кодом AP1 HT. Если фиксируется несовпадение, то выполняется сравнение с AP1 КTM.
4.4.3. Если принятая управляющая последовательность является AP1 КTM, что возможно при неопознании передающим устройством ответа от принимающего, то устройство возвращается в точку А фазы запроса (см. черт.5) и выполняет предписанные алгоритмом действия.
Несовпадение принятой управляющей последовательности с AP1 КП, AP1 HT или AP1 КTM означает искажение в КПИ и устройство возвращается в начало алгоритма (см. черт.7).
4.4.4. Если принятая управляющая последовательность является АР1 HT, то устройство, начиная со следующего байта, начинает выполнять подпрограмму приема байтов текста. При этом каждый принимаемый байт анализируется на соответствие с символом АР1. Соответствие с символом АР1 фиксируется признаком символа ПС. Если код очередного байта не совпадает с символом АР1 и ПС имеет значение НЕТ, то принимающее устройство записывает принятый байт в массив данных, подсчитывает контрольную сумму и устанавливается на прием следующего байта.
4.4.5. При обнаружении в принимаемом тексте байта с кодом, совпадающим с АР1, принимающее устройство присваивает признаку символа значение "Да" и переходит к приему следующего байта. За символом АР1 может следовать также символ АР1, применяемый для обеспечения прозрачности информации (см. п.4.3.1), либо символ КТ, означающий конец текста, т.е. передается управляющая последовательность.
4.4.6. Если последующий символ является АР1 и признак символа имеет значение "Да", принимающее устройство устанавливает признак символа в состояние "Нет" и заносит код АР1 в массив информации как очередной байт текста.
Если следующий за АР1 байт не АР1, то принимающее устройство анализирует его на соответствие с КТ (при этом признаку символа также присваивается значение "Нет"). Несоответствие принятого кода символу КТ означает ошибку приема, и принимающее устройство возвращается в начало алгоритма (см. черт.7). Соответствие символу КТ означает, что передача текста завершена и последующие два байта представляют собой ПП.
4.4.7. При равенстве вычисленной принимающим устройством контрольной суммы ![]() и величины ПП устройство формирует ответную управляющую последовательность АР1 ДА и устанавливается в режим ожидания завершения цикла связи.
и величины ПП устройство формирует ответную управляющую последовательность АР1 ДА и устанавливается в режим ожидания завершения цикла связи.
Если величины контрольной суммы ![]() и ПП не совпали, принимающее устройство формирует ответную управляющую последовательность АР1 НЕТ и возвращается в начало алгоритма ФП.
и ПП не совпали, принимающее устройство формирует ответную управляющую последовательность АР1 НЕТ и возвращается в начало алгоритма ФП.
4.4.8. Признаком завершения цикла связи является получение принимающим устройством управляющей последовательности АР1 КП. При получении АР1 КП принимающее устройство устанавливает признак "Массив принят" и переходит в начало ФУ.