ГОСТ 26043-83
Группа Т34
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
Вибрация
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТАЦИОНАРНЫХ МАШИН
Основные положения
Vibration. Dynamic characteristics of stationary machines. General
Дата введения 1985-01-01
РАЗРАБОТАН
Всесоюзным Центральным Советом Профессиональных Союзов
Государственным комитетом СССР по делам строительства
Государственным комитетом СССР по стандартам
ИСПОЛНИТЕЛИ
Ю.М.Васильев, канд. техн. наук; А.И.Цейтлин, д-р техн. наук; Е.Л.Хейнман; В.Б.Логинов, канд. техн. наук (руководители темы); В.И.Сысоев, канд. техн. наук; В.А.Кабанов; Ю.В.Агафонов, канд. техн. наук; К.В.Бебешин; И.И.Долгова; В.С.Ванаев
ВНЕСЕН Всесоюзным Центральным Советом Профессиональных Союзов
Зам. зав. отделом охраны труда Ю.Г.Сорокин
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 20 декабря 1983 г. N 6350
1. Настоящий стандарт распространяется на стационарные машины и оборудование (далее - машины) и устанавливает основные положения по определению динамических характеристик.
2. Целью установления динамических нагрузок машин являются:
получение объективных данных о динамических нагрузках машин, необходимых для проектирования несущих строительных конструкций, а также виброизоляции машин с целью обеспечения вибробезопасности на рабочих местах;
обеспечение оценки конструктивного совершенства и качества изготовления машин с точки зрения параметров вибрации.
3. Динамические нагрузки определяют в точках опирания машин на несущую конструкцию при развитии машиной рабочего режима, отвечающего техническим требованиям к изготовлению и эксплуатации машин.
4. Устанавливают следующие динамические характеристики машин:
а) значение, направление и характер приложения нагрузки к несущей конструкции (сосредоточенные силы и моменты относительно центра масс машины);
б) закон изменения нагрузки во времени;
в) скорость уменьшения частоты вращения главного вала машины при останове;
г) положение центра тяжести машины;
д) массы и моменты инерции машины относительно центральных осей.
Динамические характеристики по подпунктам а-в необходимы при проектировании несущих строительных конструкций, по подпунктам а-д - при проектировании виброизоляции машин.
5. Значения динамических характеристик устанавливают в стандартах и технических условиях на машины конкретного типа по согласованию с потребителем.
6. Для определения значения, направления, характера приложения нагрузки к несущей конструкции и закона изменения нагрузки во времени устанавливают следующие методы:
метод упругих опор;
метод жестких силоизмерителей;
метод тарирования несущих конструкций вибратором;
специальные методы.
Определение динамических нагрузок методами упругих опор, жестких силоизмерителей и тарирования вибратором приведено в справочном приложении 1.
7. Для определения скорости изменения частоты вращения главного вала машины при останове устанавливают следующие методы:
метод непосредственного измерения частоты вращения главного вала;
метод упругих опор (справочное приложение 2).
8. Для определения положения центра тяжести машины устанавливают следующие методы (справочное приложение 3):
метод самоуравновешивания;
метод статических осадок;
метод уравновешивания на ноже;
метод упругих опор;
специальные методы.
9. Для определения моментов инерции машины устанавливают следующие методы:
метод упругих опор (справочное приложение 4);
метод физического маятника.
Моменты инерции машины относительно центральных осей определяют по массе и геометрическим параметрам установки и машины, жесткости упругих опор и угловой частоте собственных колебаний машины, установленной на упругие опоры.
ПРИЛОЖЕНИЕ 1 (справочное). ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ НАГРУЗОК
ПРИЛОЖЕНИЕ 1
Справочное
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ НАГРУЗОК
Метод упругих опор
1. Для определения динамических нагрузок машину устанавливают на упругие опоры. Для упрощения испытаний упругие опоры должны допускать перемещение по одной координате.
2. Жесткость опор выбирают с таким расчетом, чтобы отношение частоты вращения главного вала к собственной частоте колебаний машины на упругих опорах было не менее трех. Жесткость опор определяют в условиях динамического нагружения. Схема установки для определения динамических нагрузок представлена на черт.1, для определения возмущающего момента - на черт.2.
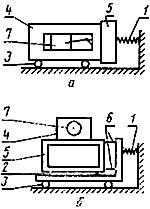
а - схема однокомпонентной установки; б - схема двухкомпонентной установки; 1 - горизонтальные упругие опоры; 2 - вертикальные упругие опоры; 3 - катки; 4 - машина; 5 - опорная плита; 6 - жесткие стержни с шарнирами; 7 - движущаяся часть машины
Черт.1
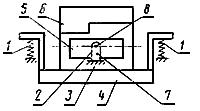
1 - вертикальные упругие опоры; 2 - линейный шарнир; 3 - машина; 4 - опорная плита; 5 - ротор машины; 6 - пригрузка; 7 - центр тяжести машины и опорной плиты (без пригрузки); 8 - центр приложения динамических нагрузок, центр тяжести установки с пригрузкой, центр жесткости упругих опор, ось вращения линейного шарнира
Черт.2
3. При поступательном движении машины возмущающая гармоническая сила ![]() , возникающая в машине, равна
, возникающая в машине, равна
![]() , (1)
, (1)
где ![]() - амплитуда вынужденных колебаний установки;
- амплитуда вынужденных колебаний установки;![]() - суммарная жесткость упругих опор;
- суммарная жесткость упругих опор;![]() - коэффициент виброизоляции, равный
- коэффициент виброизоляции, равный ![]() (
(![]() - отношение угловой частоты возмущающей силы к угловой частоте собственных колебаний установки, равное
- отношение угловой частоты возмущающей силы к угловой частоте собственных колебаний установки, равное ![]() ).
).
4. Возникающий в машине возмущающий гармонический момент относительно оси координат, проходящий через центр тяжести движущихся частей, равен
![]() , (2)
, (2)
где ![]() - амплитуда угла поворота машины на упругих опорах относительно центральной оси;
- амплитуда угла поворота машины на упругих опорах относительно центральной оси;![]() - суммарная угловая жесткость упругих опор;
- суммарная угловая жесткость упругих опор;![]() - коэффициент виброизоляции, равный
- коэффициент виброизоляции, равный ![]() ;
;![]() - отношение угловой частоты вынужденных вращательных колебаний (угловой частоты возмущающего момента) к угловой частоте собственных вращательных колебаний установки, равное
- отношение угловой частоты вынужденных вращательных колебаний (угловой частоты возмущающего момента) к угловой частоте собственных вращательных колебаний установки, равное ![]() .
.
Полигармонические динамические нагрузки определяют по формулам (1) и (2) для каждой частоты возмущающей нагрузки.
Для виброизолированных машин динамические нагрузки, определенные по формулам (1) и (2), необходимо разделить на коэффициенты виброизоляции.
Метод жестких силоизмерителей
1. Машину устанавливают на силоизмерители как на опоры. Силоизмерители должны быть расположены на достаточно жестком основании. Число и расположение силоизмерителей должны обеспечивать одинаковую передачу динамических нагрузок на каждый силоизмеритель.
2. Силоизерители содержат элементы с наклеенными на них тензорезисторами, которые позволяют измерять динамические силы в одном из трех взаимно перпендикулярных направлений. Силоизмерители могут быть многокомпонентными, если необходимо получить одновременно отдельные составляющие действующих сил.
3. Тензорезисторы, наклеенные на элементы, соединены по мостовой схеме. При деформации силоизмерительного элемента возникает пропорциональный ей разбаланс моста, который усиливается в тензоусилителе и поступает на анализатор, в котором разлагается на гармонические составляющие, а затем подается на регистрирующий прибор; в случае гармонических динамических нагрузок сигнал с тензоусилителя подается на регистрирующий прибор минуя анализатор. По вибропрограмме, записанной регистрирующим прибором, определяют амплитуды, частоты и начальные фазы динамических сил.
4. Силоизмерители тарируют статической нагрузкой.
5. При применении силоизмерителя, составленного из равновеликих упругих стержней, образующих правильную пирамиду (черт.3), жесткость силоизмерителя подбирают с таким расчетом, чтобы жесткость каждого бокового стержня ![]() была не менее
была не менее
![]() , (3)
, (3)
где ![]() - заданная жесткость пирамиды;
- заданная жесткость пирамиды;![]() - грузоподъемность силоизмерителя (статическая нагрузка, приходящаяся на один силоизмеритель);
- грузоподъемность силоизмерителя (статическая нагрузка, приходящаяся на один силоизмеритель);![]() - статическая осадка пирамиды при полной нагрузке;
- статическая осадка пирамиды при полной нагрузке;![]() - собственная угловая частота;
- собственная угловая частота;![]() - ускорение силы тяжести.
- ускорение силы тяжести.
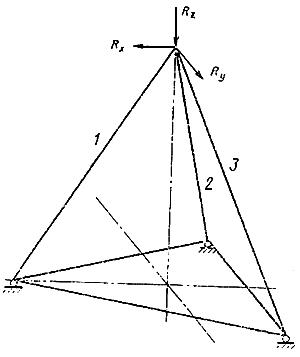
1-3 - стержни
Черт.3
Метод тарирования несущих конструкций вибратором
1. Динамические нагрузки определяют по результатам измерения амплитуд колебаний строительных конструкций в характерных точках при работе машин с использованием коэффициентов влияния, вычисленных для этих характерных точек по результатам измерения амплитуд колебаний при работе специального тарировочного вибратора.
2. Вибратор, применяемый для тарирования строительных конструкций при определении коэффициентов влияния, содержит привод, например, электродвигатель постоянного тока, на вал которого насажен дебаланс с дисками (черт.4), позволяющими изменять значение генерируемой динамической силы при постоянной частоте вращения, равной частоте вращения испытываемой машины.
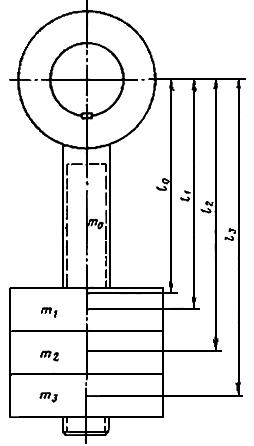
![]() - масса дебаланса;
- масса дебаланса; ![]() ,
, ![]() ,
, ![]() - массы дисков;
- массы дисков; ![]() - расстояние от оси вращения до центра тяжести дебаланса;
- расстояние от оси вращения до центра тяжести дебаланса; ![]() ,
, ![]() ,
, ![]() - расстояния от оси вращения до центров тяжести дисков
- расстояния от оси вращения до центров тяжести дисков
Черт.4
Амплитуду динамической силы, создаваемой вибратором, определяют по формуле
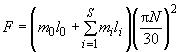 , (4)
, (4)
где ![]() - масса дебаланса;
- масса дебаланса;![]() - расстояние от оси вращения до центра тяжести дебаланса;
- расстояние от оси вращения до центра тяжести дебаланса;![]() - масса
- масса ![]() -гo диска, навернутого на дебаланс;
-гo диска, навернутого на дебаланс;![]() - расстояние от оси вращения до центра тяжести массы
- расстояние от оси вращения до центра тяжести массы ![]() -го диска;
-го диска;![]() - число дисков;
- число дисков;![]() - частота вращения вибратора, об/мин.
- частота вращения вибратора, об/мин.
Амплитуда динамического момента, создаваемого вибратором и действующего на строительную конструкцию, равна
![]() ;
; ![]() , (5)
, (5)
где ![]() ,
, ![]() - расстояния от оси вращения вибратора до плоскости строительной конструкции, относительно которой происходят колебания (черт.5).
- расстояния от оси вращения вибратора до плоскости строительной конструкции, относительно которой происходят колебания (черт.5).
Черт.5
![]() ,
, ![]() - точки, в которых измерялись амплитуды колебаний строительных конструкций;
- точки, в которых измерялись амплитуды колебаний строительных конструкций; ![]() - опоры строительных конструкций; 1 - машина; 2 - ось строительной конструкции; 3 - первое положение вибратора; 4 - второе положение вибратора
- опоры строительных конструкций; 1 - машина; 2 - ось строительной конструкции; 3 - первое положение вибратора; 4 - второе положение вибратора
Черт.5
Наилучшие места расположения вибратора - на машине и под ней. Если невозможно установить вибратор в указанных местах, его размещают рядом с машиной. В этом случае станину вибратора снабжают рамой с возможностью изменения расстояния от оси вращения вибратора до плоскости основания рамы. Во всех случаях вибратор устанавливают с таким расчетом, чтобы ось вращения его была параллельна оси вращения машины. Вибратор в месте установки крепят жестко, например, с помощью болтов.
3. Основными зависимостями для определения коэффициентов влияния являются
![]() ;
; ![]() , (6)
, (6)
где ![]() ,
, ![]() - коэффициенты влияния;
- коэффициенты влияния;![]() - амплитуда динамической силы, создаваемой вибратором;
- амплитуда динамической силы, создаваемой вибратором;![]() ,
, ![]() - амплитуды динамического момента при
- амплитуды динамического момента при ![]() и
и ![]() соответственно;
соответственно;![]() - амплитуда колебаний в характерной точке
- амплитуда колебаний в характерной точке ![]() при работе вибратора, генерирующего динамические нагрузки
при работе вибратора, генерирующего динамические нагрузки ![]() и
и ![]() ;
;![]() - амплитуда колебаний в той же характерной точке при работе вибратора, генерирующего динамические нагрузки
- амплитуда колебаний в той же характерной точке при работе вибратора, генерирующего динамические нагрузки ![]() и
и ![]() .
.
Коэффициенты влияния равны
![]() ;
; ![]() . (7)
. (7)
Величины ![]() ,
, ![]() и
и ![]() , определяемые по формулам (4) и (5) в зависимости от масс дебаланса и дисков, а также от величин
, определяемые по формулам (4) и (5) в зависимости от масс дебаланса и дисков, а также от величин ![]() и
и ![]() , принимают такими, чтобы амплитуды колебаний
, принимают такими, чтобы амплитуды колебаний ![]() и
и ![]() в характерной точке
в характерной точке ![]() можно было бы измерить с достаточной точностью. Для этого
можно было бы измерить с достаточной точностью. Для этого ![]() и
и ![]() , а, следовательно, и
, а, следовательно, и ![]() и
и ![]() должны существенно отличаться друг от друга, так чтобы коэффициенты влияния были не слишком большие. Коэффициенты влияния для одного измерения динамических нагрузок от машины определяют в двух различных характерных точках. На строительной конструкции они должны быть зафиксированы номерами, например
должны существенно отличаться друг от друга, так чтобы коэффициенты влияния были не слишком большие. Коэффициенты влияния для одного измерения динамических нагрузок от машины определяют в двух различных характерных точках. На строительной конструкции они должны быть зафиксированы номерами, например
1 и 2.
4. Основными зависимостями, служащими для определения динамических нагрузок от машины, амплитуды динамической силы ![]() и амплитуды динамического момента
и амплитуды динамического момента ![]() , являются
, являются
![]() ;
; ![]() , (8)
, (8)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() - две пары коэффициентов влияния, определенные по формулам (7);
- две пары коэффициентов влияния, определенные по формулам (7);![]() ,
, ![]() - амплитуды динамической силы и динамического момента машины;
- амплитуды динамической силы и динамического момента машины;![]() ,
, ![]() - амплитуды колебаний строительной конструкции, измеренные при работе машины в тех точках, для которых определены коэффициенты влияния.
- амплитуды колебаний строительной конструкции, измеренные при работе машины в тех точках, для которых определены коэффициенты влияния.
Динамические нагрузки ![]() и
и ![]() от машины равны
от машины равны
![]() ;
; ![]() . (9)
. (9)
5. Погрешность измерений динамических нагрузок, кроме погрешности приборов и погрешности обработки виброграмм, определяют исходя из того, насколько значительна роль несовпадения опор машины и вибратора на строительной конструкции. С целью уменьшения и оценки этой погрешности измерения выполняют несколько раз при различных положениях вибратора. При этом датчики для измерения колебаний строительных конструкций устанавливают на одинаковом удалении от машины и вибратора, максимально возможном с точки зрения их чувствительности.
ПРИЛОЖЕНИЕ 2 (справочное). ОПРЕДЕЛЕНИЕ СКОРОСТИ ИЗМЕНЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ГЛАВНОГО ВАЛА МАШИНЫ ПРИ ОСТАНОВЕ МЕТОДОМ УПРУГИХ ОПОР
ПРИЛОЖЕНИЕ 2
Справочное
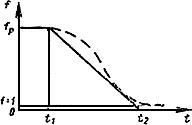
1. График изменения частоты вращения главного вала машины при останове, помещенный на чертеже, аппроксимируют прямой
![]() ,
, ![]() , (1)
, (1)
где ![]() - скорость изменения частоты вращения главного вала машины;
- скорость изменения частоты вращения главного вала машины;![]() - постоянная величина.
- постоянная величина.
2. Значение ![]() определяют по формуле
определяют по формуле
![]() , (2)
, (2)
где ![]() - частота вращения главного вала машины в рабочем режиме.
- частота вращения главного вала машины в рабочем режиме.
3. Значение ![]() соответствует моменту выключения двигателя машины, значение
соответствует моменту выключения двигателя машины, значение ![]() определяют по графику при
определяют по графику при ![]() Гц.
Гц.
ПРИЛОЖЕНИЕ 3 (справочное). ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ МАШИНЫ
ПРИЛОЖЕНИЕ 3
Справочное
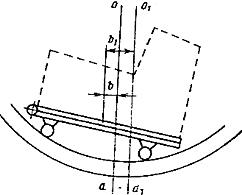
1. Метод самоуравновешивания
1.1 Стенд (черт.1) состоит из основания, изогнутого по дуге окружности или по циклоиде с вертикальной осью, и тележки, состоящей из двух шарнирно-соединенных рам.
Черт.1
Черт.1
Длина дуги основания должна быть приблизительно равна удвоенной длине тележки, размеры которой должны соответствовать размерам машины в плане. Радиусы окружности или круга, производящего циклоиду, выбирают с таким расчетом, чтобы машина вместе с тележкой свободно вписывались в дугу основания. На основании неподвижно закреплена линейка, которая дает возможность непосредственно измерить положение плоскости ![]() , перпендикулярной к плоскости чертежа, в которой расположен центр тяжести машины с тележкой.
, перпендикулярной к плоскости чертежа, в которой расположен центр тяжести машины с тележкой.
1.2. При определении положения центра тяжести машину устанавливают на тележку, после чего она займет положение, при котором центр тяжести машины и тележки расположится в плоскости ![]() , перпендикулярной к плоскости чертежа. Центр тяжести машины будет расположен в плоскости
, перпендикулярной к плоскости чертежа. Центр тяжести машины будет расположен в плоскости ![]() , отстоящей от центра тяжести тележки на расстояние
, отстоящей от центра тяжести тележки на расстояние ![]() , равное
, равное
![]() , (1)
, (1)
где ![]() - масса машины и тележки;
- масса машины и тележки; ![]() - масса машины;
- масса машины;![]() - расстояние от центра тяжести тележки до плоскости
- расстояние от центра тяжести тележки до плоскости ![]() .
.
Для определения второй координаты центра тяжести машину поворачивают на 90° вокруг оси, перпендикулярной к площадке тележки. Тележка займет второе положение, при котором таким же образом находят плоскости ![]() и
и ![]() расстояние
расстояние ![]() от центра тяжести тележки.
от центра тяжести тележки.
Для определения третьей координаты центра тяжести раздвигают раму тележки на угол 20-30° и затем на тележку устанавливают машину. Тележка займет третье положение, при котором находят плоскости ![]() и
и ![]() и расстояние
и расстояние ![]() от центра тяжести тележки.
от центра тяжести тележки.
2. Метод статических осадок
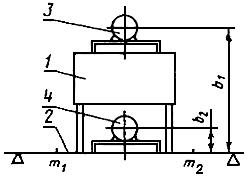
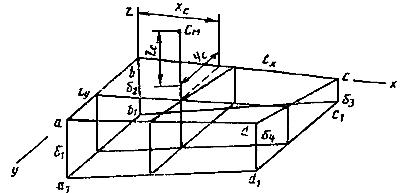
2.1. Стенд представляет собой плиту, опирающуюся на одинаковые по жесткости пружины (черт.2). Измеряют высоты упругих опор до и после установки машины. Машину на стенд следует устанавливать так, чтобы плита не получила большого наклона в любую сторону.
Черт.2
![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() ,
, ![]() ,
, ![]() ,
, ![]() - места опирания плиты стенда на упругие опоры до и после установки машины на стенд;
- места опирания плиты стенда на упругие опоры до и после установки машины на стенд; ![]() - центр тяжести машины
- центр тяжести машины
Черт.2
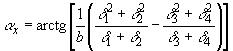
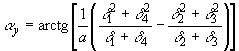
2.2. Координаты ![]() и
и ![]() центра тяжести машины в плане равны
центра тяжести машины в плане равны
![]() ; (2)
; (2)
![]() ;
; ;
;
(3)
 ;
; ;
;
(4)
 ,
,
где ![]() ,
, ![]() ;
; ![]() ,
, ![]() - разности статических осадок плиты стенда в местах опирания плиты на упругие опоры до и после установки машины;
- разности статических осадок плиты стенда в местах опирания плиты на упругие опоры до и после установки машины;![]() ,
, ![]() - расстояние между осями упругих опор;
- расстояние между осями упругих опор;![]() - координата центра тяжести по высоте машины; принимается в первом приближении равной
- координата центра тяжести по высоте машины; принимается в первом приближении равной
![]() ; (5)
; (5)
![]() - высота машины.
- высота машины.
Для определения координаты ![]() центра тяжести, одну сторону машины приподнимают, наклоняя ее на 20-30°, если есть возможность то на 90°. Измерив разности статических осадок плиты стенда до и после установки машины по формулам (2) определяют
центра тяжести, одну сторону машины приподнимают, наклоняя ее на 20-30°, если есть возможность то на 90°. Измерив разности статических осадок плиты стенда до и после установки машины по формулам (2) определяют ![]() и
и ![]() , где индекс * означает, что
, где индекс * означает, что ![]() и
и ![]() определены при наклонном положении машины, после чего
определены при наклонном положении машины, после чего
![]() , (6)
, (6)
если наклон машины на угол произведен вокруг оси, параллельной оси ![]() или
или
![]() , (7)
, (7)
если наклон машины на угол ![]() произведен вокруг оси, параллельной оси
произведен вокруг оси, параллельной оси ![]() , где
, где ![]() ,
, ![]() - расстояния от того края машины в основании, относительно которого производят наклон машины на угол до плоскости
- расстояния от того края машины в основании, относительно которого производят наклон машины на угол до плоскости ![]() или
или![]() , параллельной этому краю.
, параллельной этому краю.
При ![]()
![]() (8)
(8)
или
![]() , (9)
, (9)
в зависимости от того, вокруг какой оси произведен наклон машины.
3. Метод уравновешивания на ноже
3.1. Положение центра тяжести машины определяют по схеме, приведенной на черт.3.
Черт.3
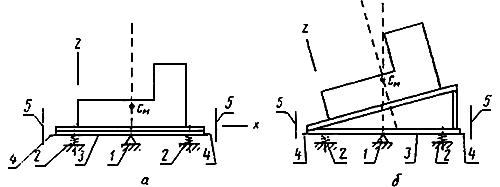
![]() - определение координат
- определение координат ![]() и
и ![]() ;
; ![]() - определение координаты
- определение координаты ![]() ;
;
1 - нож;
2 - ненагружаемые страховочные упругие опоры; 3 - раздвижная рама; 4 - стрелки указателя уровня; 5 - шкалы;![]() - центр тяжести машины
- центр тяжести машины
Черт.3
Положение центра тяжести определяют пробной установкой машины на раздвижную раму и снятием отсчетов по шкале. Для положения машины, при котором отсчеты с двух сторон совпадают, измеряют одну из координат ![]() ,
, ![]() или
или ![]() центра тяжести машины. Вначале при горизонтальном положении машины определяют одну координату
центра тяжести машины. Вначале при горизонтальном положении машины определяют одну координату ![]() или
или ![]() , затем поворачивают машину на 90° и определяют другую координату. Координату
, затем поворачивают машину на 90° и определяют другую координату. Координату ![]() определяют, наклоняя машину на угол 20-30°.
определяют, наклоняя машину на угол 20-30°.
4. Метод упругих опор
4.1. Положение центра тяжести машины определяют по схеме, приведенной на черт.4.
Черт.4
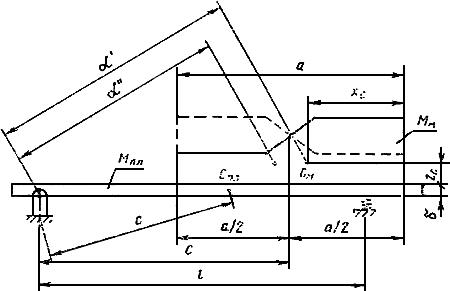
![]() - центр тяжести плиты;
- центр тяжести плиты; ![]() - центр тяжести машины
- центр тяжести машины
Черт.4
Машину устанавливают на стенд так, чтобы проекция ее центра тяжести находилась приблизительно на продольной оси плиты по возможности ближе к упругим опорам. Момент инерции машины относительно своего центра тяжести в первом приближении принимают равным нулю, если он известен, то своему истинному значению.
4.2. Расстояние от оси линейного шарнира, относительно которого происходят колебания, до центра тяжести машины равно
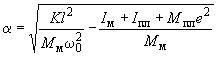 , (10)
, (10)
где ![]() - жесткость пружины;
- жесткость пружины;![]() - расстояние между осями линейного шарнира и пружины;
- расстояние между осями линейного шарнира и пружины;![]() - расстояние от линейного шарнира до центра тяжести плиты;
- расстояние от линейного шарнира до центра тяжести плиты;![]() - масса плиты;
- масса плиты;![]() - масса машины;
- масса машины;![]() - момент инерции плиты относительно ее центральной оси, параллельной линейному шарниру;
- момент инерции плиты относительно ее центральной оси, параллельной линейному шарниру;![]() - момент инерции машины относительно ее центральной оси, параллельной линейному шарниру;
- момент инерции машины относительно ее центральной оси, параллельной линейному шарниру;![]() - угловая частота собственных колебаний установки.
- угловая частота собственных колебаний установки.
Определяют ![]() при первом положении машины и
при первом положении машины и ![]() при втором положении машины, отличающемся от первого тем, что машина повернута относительно вертикальной оси на 180° и установлена на прежнее место. Координаты центра тяжести равны
при втором положении машины, отличающемся от первого тем, что машина повернута относительно вертикальной оси на 180° и установлена на прежнее место. Координаты центра тяжести равны
![]() ; (11)
; (11)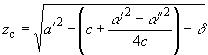 , (12)
, (12)
где ![]() - габаритный размер машины в направлении оси
- габаритный размер машины в направлении оси ![]() ;
;![]() - расстояние от оси линейного шарнира до проекции середины отрезка
- расстояние от оси линейного шарнира до проекции середины отрезка ![]() на горизонтальную ось
на горизонтальную ось ![]() ;
;![]() - толщина плиты стенда.
- толщина плиты стенда.
Для определения координаты ![]() центра тяжести машину поворачивают вокруг вертикальной оси на 90° и проделывают те же операции, что и для определения координат
центра тяжести машину поворачивают вокруг вертикальной оси на 90° и проделывают те же операции, что и для определения координат ![]() и
и ![]() . При этом координату
. При этом координату ![]() определяют вторично с целью контроля.
определяют вторично с целью контроля.
ПРИЛОЖЕНИЕ 4 (справочное). ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ МАШИНЫ МЕТОДОМ УПРУГИХ ОПОР
ПРИЛОЖЕНИЕ 4
Справочное
1. Моменты инерции машины относительно центральных осей определяют по схемам, приведенным на чертеже. Машину устанавливают на стенд так, чтобы проекция ее центра тяжести на среднюю плоскость плиты совпадала с центром тяжести плиты. Определяют три частоты собственных колебаний установки относительно линейных шарниров, т.е. продольной и поперечных осей, проходящих в нижней плоскости плиты через проекции центров тяжести машины и плиты, и относительно вертикальной оси, проходящей через проекции центров тяжести машины и плиты.
2. Моменты инерции машины относительно осей, проходящих через ее центр тяжести, равны
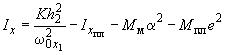 ; (1)
; (1) ; (2)
; (2) , (3)
, (3)
где ![]() ,
, ![]() ,
, ![]() - моменты инерции плиты стенда относительно ее центральных осей;
- моменты инерции плиты стенда относительно ее центральных осей;![]() - суммарная вертикальная жесткость пружин стенда;
- суммарная вертикальная жесткость пружин стенда;![]() - суммарная горизонтальная жесткость пружин стенда;
- суммарная горизонтальная жесткость пружин стенда;![]() ,
, ![]() - массы машины и плиты стенда;
- массы машины и плиты стенда;![]() ,
, ![]() - расстояния от оси линейного шарнира до оси пружины в направлении осей
- расстояния от оси линейного шарнира до оси пружины в направлении осей ![]() и
и ![]() ;
;![]() ,
, ![]() - расстояния от линейных шарниров до центров тяжести машины и плиты;
- расстояния от линейных шарниров до центров тяжести машины и плиты;![]() ,
, ![]() ,
, ![]() - угловые частоты собственных вращательных колебаний плиты стенда с машиной относительно линейных шарниров, определяемые экспериментально.
- угловые частоты собственных вращательных колебаний плиты стенда с машиной относительно линейных шарниров, определяемые экспериментально.
Чертеж
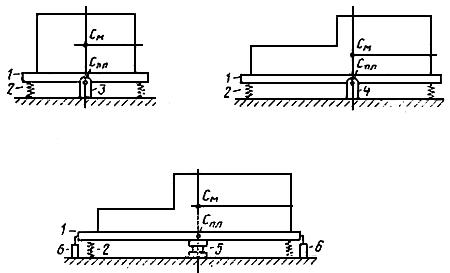
1 - плита стенда; 2 - упругие опоры; 3-5 - съемные линейные шарниры вдоль осей;
6 - поддерживающие ролики; ![]() - центр тяжести машины;
- центр тяжести машины; ![]() - центр тяжести плиты стенда
- центр тяжести плиты стенда