ГОСТ Р МЭК 870-1-2-95
Группа П77
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 1. Основные положения.
Раздел 2. Руководство по разработке технических требований
Telecontrol equipment and systems. Part 1. General considerations.
Section 2. Guide for specifications
ОКС 33.200
ОКП 42 3200
Дата введения 1996-01-01
Предисловие
1 РАЗРАБОТАН АО Научно-исследовательским институтом электроэнергетики (ВНИИЭ)
ВНЕСЕН Министерством топлива и энергетики Российской Федерации
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 23 марта 1995 г. N 153
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 870-1-2-89 "Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 2. Руководство по разработке технических требований"
3 ВВЕДЕН ВПЕРВЫЕ
ВВОДНАЯ ЧАСТЬ
ВВОДНАЯ ЧАСТЬ
Проектирование систем телемеханики и задание технических требований на систему и ее устройство представляет весьма сложную задачу, требующую большого количества подробной информации. Это определение не только функций системы, но также и эксплуатационных параметров, местных окружающих условий, имеющихся каналов связи и их параметров. Должны также быть определены интерфейсы между частями системы и другим оборудованием, а также требования к источникам питания.
Аспекты этих проблем рассматриваются в стандартах на устройства и системы телемеханики серии МЭК 870.
1 ОБЪЕКТ СТАНДАРТИЗАЦИИ
Настоящий стандарт распространяется на устройства и системы телемеханики с передачей информации последовательными двоичными кодами для контроля и управления территориально распределенными процессами.
1а НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ Р МЭК 870-1-1-93 Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 1. Общие принципы
ГОСТ Р МЭК 870-2-1-93 Устройства и системы телемеханики. Часть 2. Условия эксплуатации. Раздел 1. Условия окружающей среды и источники питания
ГОСТ Р МЭК 870-3-93 Устройства и системы телемеханики. Раздел 3. Интерфейсы (электрические характеристики)
ГОСТ Р МЭК 870-4-93 Устройства и системы телемеханики. Часть 4. Технические требования
ГОСТ Р МЭК 870-5-1-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 1. Форматы передаваемых кадров
ГОСТ Р МЭК 870-5-2-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 2. Процедуры в каналах передачи
ГОСТ Р МЭК 870-5-3-95 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 3. Общая структура данных пользователя
2 ЦЕЛИ СТАНДАРТИЗАЦИИ
Настоящий стандарт представляет собой руководство по разработке технических требований на устройства и системы телемеханики на основе других стандартов МЭК на системы телемеханики и других международных стандартов и рекомендаций, затрагивающих сферу телемеханики (например, документы МККТТ)*. Данное руководство также облегчает сравнение устройств различных изготовителей.
________________
* МККТТ - Международный консультативный комитет по телефонной и телеграфной связи.
Проектирование систем телемеханики подразделяют на четко определенные этапы:
- первый этап включает рассмотрение эксплуатационных требований к системе телемеханики (раздел 3);
- на втором этапе рассматривают условия и ограничения сети передачи данных и определяют наиболее подходящее их использование (раздел 4);
- на третьем этапе определяют требуемые характеристики аппаратуры телемеханики и других устройств систем телемеханики. Сюда входит рассмотрение целесообразности включения существующих местных устройств управления (раздел 5).
Руководящие указания также полезны при использовании только части системы телемеханики. В этом случае могут рассматриваться только соответствующие разделы.
3 ОПИСАНИЕ СИСТЕМ ТЕЛЕМЕХАНИКИ И ИХ ФУНКЦИИ
Назначение системы, например:
- "Система телемеханики главного (Регионального) диспетчерского управления... (название энергетической компании или региона)" или
- "Районная система телемеханики... (название самого района или центра управления районом)", или
- "Система телемеханики для электростанции... (название контролируемой станции)".
3.1 Описание телеуправляемого (или телеконтролируемого) процесса
3.1.1 Назначение контролируемого процесса
(Краткое разъяснение, необходимое только для проектирования систем телемеханики).
3.1.2 Наименование пунктов управления
Описание назначения, например, диспетчерский центр, районный центр управления и т.п.
3.1.3 Число и наименование контролируемых пунктов (КП)
Описание их назначения, например "Электростанция...", "Трансформаторная подстанция" и т.п.
З.1.4 Географическая структура системы
Описание структуры и топологии системы.
3.1.5 Взаимное расположение связанных пунктов и расстояния между ними
3.2 Функции систем телемеханики
3.2.1 Перечень функций
3.2.1.1. Основные функции:
- телеизмерение перетоков мощности, генерируемой мощности, суммарного потребления мощности, напряжения линий, частоты, температуры, уровней бьефов и т.п.;
- телесчет генерируемой энергии, потребления энергии, передачи энергии и т.п.;
- телесигнализация положения выключателей, действия защиты, аварийная сигнализация и т.п.;
- телеуправление выключателями и т.п.;
- синхронизация между КП и главным пунктом управления;
- метки времени для информации.
3.2.1.2 Расширенные функции обработки:
- телерегулирование генерируемой мощности (ручное или автоматическое);
- автоматическое регулирование частоты и мощности (АРЧМ);
- оценка состояния;
- автоматический сброс нагрузки;
- программное переключение;
- интерфейс оператора (такой как указатель работы системы, информационный дисплей);
- регистрация и представление информации;
- запоминание данных (кратковременное и долговременное) и т.п.
3.2.2 Требования к эксплуатационным параметрам
ГОСТ Р МЭК 870-4 определяет следующие эксплуатационные параметры:
- безотказность;
- готовность;
- ремонтопригодность;
- безопасность;
- достоверность данных;
- временные параметры;
- точность.
При определении временных параметров особое внимание нужно обратить на:
- полное время передачи (суммарное время прохождения информации через отдельные части системы телемеханики, зависящие также от конфигурации сети, приоритета, накопления событий и т.п.);
- параметры информации о состоянии, такие как разрешающая способность по очередности, по времени и т.п.;
- время обновления информации для измеряемых величин и команд уставки;
- и т.п.
Необходимо подчеркнуть, что при определении вышеупомянутых параметров следует учитывать требования контролируемого (управляемого) процесса.
3.2.3 Подробное описание требований
Требуемые характеристики должны быть перечислены и кратко описаны. Ниже перечислены стандартные характеристики систем телемеханики.
3.2.3.1 Сбор и ввод следующей контрольной информации:
- одноэлементная информация; информация об авариях; о состоянии (кратковременном или длительном состоянии); информация об ошибочном состоянии и т.п.;
- двухэлементная информация с или без опроса промежуточного состояния выключателей, разъединителей и т.п.;
- интегральные величины для телесчета значений энергии и т.п.;
- информация о приращении для величин перетока и т.п.;
- измеряемые величины (аналоговые или дискретные) с циклической передачей или передачей по запросу для значений электрических, гидравлических и других величин;
- требования к отметкам времени;
- групповой или общий аварийный сигнал цифровой или аналоговой информации;
- информация, относящаяся к самой системе телемеханики, например, сигнализация ошибок передачи, повреждения аппаратуры и т.п.;
- другие типы информации.
3.2.3.2 Выходная информация и ее представление:
- информация о состоянии;
- двухэлементная информация с индикацией или без индикации промежуточного состояния;
- аварийная информация о групповой или общей аварии;
- импульсный выход или постоянная индикация интегральных величин;
- аналоговая или цифровая индикация значений измеряемых величин;
- регистрация информации;
- функции запоминания данных.
3.2.3.3 Командные (управляющие) входы:
- команды на переключение, однопозиционные команды для изменения состояния оперативного оборудования в одном направлении (импульсные или непрерывные команды);
- команды на переключение, двухпозиционные команды для выключателей, разъединителей и т.п. (импульсные или продолжительные команды);
- команды уставки величины, передаваемые к управляемому оборудованию;
- многопозиционные команды для измерения состояния оперативного оборудования, имеющего более двух состояний;
- команды регулирования (аналоговые или цифровые) для телеконтроля или телеуправления в замкнутом контуре;
- команды пошагового или непрерывного регулирования;
- предварительные и исполнительные команды;
- служебные команды для воспроизведения стандартных инструкций оператору на пункте управления удаленной станции с ручным управлением, например, "Пуск генераторов";
- последовательности команд;
- групповые команды, адресованные нескольким объектам управления на одном КП;
- циркулярные команды, адресуемые оборудованию на нескольких или всех КП системы телемеханики;
- команды, относящиеся к самой системе телемеханики;
- команды запроса;
- команды контроля для того, чтобы удостовериться, что устройства телемеханики работают правильно;
- другие виды информации.
3.2.3.4 Вывод управляющей информации:
- одноэлементные команды;
- двухэлементные команды с или без контроля неправильного состояния;
- команды уставки с или без индикации правильности приема и с или без запоминания;
- многопозиционные команды;
- последовательность команд;
- воспроизведение команд инструкций.
3.3 Информационная емкость
Количественные данные об информационной емкости могут быть выражены числом точек входов и выходов. Число этих точек может быть задано в виде перечня или таблиц, отражающих требуемые функции и их расположение в системе телемеханики, например, как указано в таблицах 1-4.
Таблица 1 - Информационные входы
Входы | Устройства | Сумма | |||
|
| …. |
| ||
Одноэлементная база | |||||
Двухэлементная база | |||||
" | |||||
Другие типы информации | |||||
Таблица 2 - Информационные выходы (для одного устройства)
Выходы | Представление информации | ||||
Мимический щит | Цифровое отображение | Аналоговое отображение | … | Регистрация | |
Информация о состоянии | - | ||||
Двухэлементная информация (с промежуточным положением) | |||||
" | |||||
Измеряемая величина | |||||
Примечание - Должны быть указаны начальная и максимальная емкости, если они не одинаковы. | |||||
Таблица 3 - Управляющая информация
Входы | Устройство КП | Сумма | |||
|
| …. |
| ||
Однопозиционные команды (импульсные) | |||||
Однопозицирнные команды (непрерывные) |
| ||||
" | |||||
Другие типы информации | |||||
Таблица 4 - Вывод команд (для одного устройства)
Выходы | Тип выходного сигнала | |||
Импульсный выход | Непрерывный выход | …. | Регистрация | |
Однопозиционные команды | ||||
Двухпозиционные команды (с проверкой) | ||||
" | ||||
Команды контроля | ||||
Примечание - Должны быть указаны начальная и максимальная емкости, если они не одинаковы. | ||||
3.4 Интерфейс человек-машина
Интерфейс человек-машина обеспечивает оператора и эксплуатационный персонал надежной информацией о действительном состоянии контролируемого процесса и самой системы телемеханики.
Ниже приведен список элементов интерфейса человек-машина:
- мимический щит;
- пульт управления;
- показывающие приборы;
- визуальные дисплеи;
- печатающие устройства;
- звуковая сигнализация;
- оборудование для обслуживания и ремонта.
3.5 Характерстика потока данных
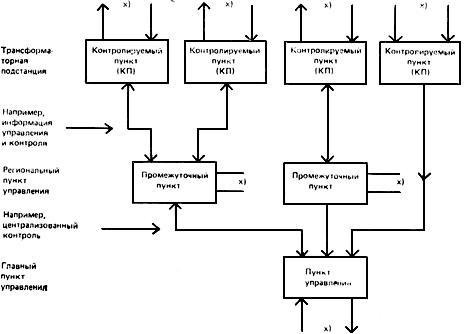
3.5.1 Блок-схема потока данных
Пример блока-схемы, показывающий типы и количество информации, передаваемой системой телемеханики, приведен на рисунке 1.
Рисунок 1 - Блок-схема потока данных
________________
* Типы данных и количество - в соответствии с таблицами 1-4.
Рисунок 1 - Блок-схема потока данных
3.5.2 Поток данных в нормальных и аварийных условиях
3.5.2.1 Порядок передачи данных при изменении состояния контролируемого процесса:
а) нормальные условия [с низкой частотой появления (редким появлением) событий в единицу времени];
б) аварийные условия (большое число событий на одном или нескольких КП).
3.5.2.2 Изменения потока данных по другим причинам:
- по инициативе устройства;
- передача интегральных величин после изменения тарифа;
- передача по запросу специальной информации (после команды запроса);
- прочие причины.
4 ХАРАКТЕРИСТИКИ СЕТИ ПЕРЕДАЧИ ДАННЫХ
4.1 Структура сети данных
Строится в соответствии с различными возможными конфигурациями (см. 4.4 ГОСТ Р МЭК 870-1-1) и с учетом потока данных проектируемой системы телемеханики (см. 3.5 настоящего стандарта).
4.1.1 Структура каналов передачи данных
Возможны различные структуры каналов:
- точка-точка;
- многоточечная структура (например, радиальная структура один-один);
- смешанная (гибридная) структура.
При построении сети передачи данных нужно принять во внимание 4.1.2-4.1.6, а окончательное решение должно быть представлено в 5.3.
4.1.2 Требования к скорости передачи для различных каналов связи
Должны соответствовать требуемому времени передачи, которое определяется 3.2.2 настоящего стандарта.
4.1.3 Характеристики путей передачи и сред, используемых для систем телемеханики.
Пути передачи по возможным каналам связи - ВЧ по ВЛ*, свето-волоконные линии, микроволновые и другие радиоканалы, частные линии связи, арендованные каналы и пути передачи.
________________
* ВЧ по ВЛ - высокочастотная связь по высоковольтным линиям передачи.
Необходимая координация каналов передачи телемеханических данных (см. 5.1.2) с другими каналами передачи, например, для телефона, телезащиты и т.п., расположенными в том же тракте передачи (с частотным или временным разделением).
4.1.4 Требования к характеристикам, выбранным для телемеханических каналов связи:
- отношение сигнал/помеха;
- вероятность искажения бита;
- вероятность появления пакетов ошибок;
- готовность каналов.
4 1.5 Сжатие данных
Необходимо стремиться к уменьшению (сжатию) данных для экономичной передачи полезных данных в различные точки телемеханической сети.
4.1.6 Требования по резервированию каналов связи
Определяют в соответствии с требуемой готовностью. Должны быть определены критерии необходимости резервирования.
4.2. Требования к передаче телемеханических данных
В соответствии со стандартными протоколами (см. ГОСТ Р МЭК 870-5-1) должны быть определены следующие требования:
4.2.1 Методы передачи:
- циклическая передача;
- передача по запросу;
- передача, инициируемая случайным событием (спорадическая передача);
- комбинация вышеперечисленных способов запуска.
4.2.2 Характеристики видов обслуживания каналов связи
В соответствии с требуемой достоверностью данных и временем передачи рассматриваются следующие виды обслуживания:
- посылка/без ответа;
- посылка/подтверждение;
- запрос/ответ;
- приоритеты передачи: корреляция различных типов данных с требуемыми приоритетами передачи в соответствии с временными требованиями для различных пользовательских функций (см. ГОСТ Р МЭК 870-5-1, ГОСТ Р МЭК 870-5-2, ГОСТ Р МЭК 870-5-3).
4.2.3 Типы передачи:
- дуплексная;
- полудуплексная;
- симплексная.
4.2.4 Требования к готовности передачи данных
В соответствии с ГОСТ Р МЭК 870-4, ГОСТ Р МЭК 870-5-1, ГОСТ Р МЭК 870-5-2, ГОСТ Р МЭК 870-5-3.
4.2.5 Характеристики оконечного оборудования цепи передачи данных
МККТТ рекомендует ряд стандартов, таких как серия V для аналоговой передачи и серия Х для цифровой передачи.
Сюда же относятся следующие характеристики, связанные с достоверностью данных и эффективностью передачи: частота сигнала, помехоустойчивость и соответствующие зависимости, связанные с отношением сигнал/помеха, вероятность искажения бита и вероятность стирания бита.
4.3 Представление планируемой сети передачи данных в виде структурной схемы
По 3.5.1
5 ХАРАКТЕРИСТИКИ АППАРАТУРЫ
5.1 Перечень аппаратуры системы телемеханики:
- аппаратура процесса и аппаратура оператора;
- аппаратура телемеханики;
- оконечное оборудование цепи передачи данных (АПД);
- аппаратура канала связи, например, ВЧ по ВЛ, радиорелейная и т.п.;
- аппаратура блоков питания.
5.1.1 Обеспечение резервирования для выполнения требования классов готовности (см. ГОСТ Р МЭК. 870-4).
5.1.2 Анализ существующей аппаратуры и систем
Необходимо проверить, полезно ли включать существующую местную аппаратуру управления в систему телемеханики, особенно с точки зрения интерфейса (например, присоединения к местным устройствам автоматики при помощи последовательного или параллельного интерфейса).
5.1.3 Возможности расширения
Оценка возможности расширения (ГОСТ Р МЭК 870-4).
5.2 Требования условий окружающей среды
Должны быть рассмотрены следующие условия (в соответствии с ГОСТ Р МЭК 870-2-1):
- температура, влажность и атмосферное давление;
- механические воздействия;
- электромагнитная совместимость;
- влияние факторов, вызывающих коррозию и эрозию;
- влияние источника питания;
- заземление и экранирование.
Эти условия должны быть определены для всех мест расположения аппаратуры и для каждого отдельного аппарата:
a) в аппаратном помещении;
b) для аппаратуры, устанавливаемой на открытом воздухе. Наиболее важные для рассмотрения элементы аппаратуры:
- аппаратура процесса, такая как датчики, преобразователи, исполнительные механизмы;
- схемы монтажных соединений и экранирование;
- система передачи, участки существующих каналов связи, число каналов и их характеристики;
- существующие источники питания и их характеристики.
5.3 Требования к интерфейсам между различными устройствами в системах телемеханики
В соответствии с ГОСТ Р МЭК 870-3 и ГОСТ Р МЭК 870-2-1 (только для блоков питания).
5.3.1 Аппаратура процесса на КП:
a) характеристики электрических связей с процессом (характеристики развязывающих устройств для ввода двоичной информации и вывода команд);
b) характеристики условий связи с устройствами телемеханики или проверка и описание возможностей интерфейса существующей аппаратуры процесса;
c) зависимости между входными величинами (например, МВт) и выходными величинами датчиков (например, мА);
d) характеристики источников питания для аппаратуры процесса, развязывающих устройств и т.п.
5.3.2 Аппаратура телемеханики на КП:
а) характеристики интерфейса между устройством телемеханики и оконечным оборудованием цепи передачи данных в соответствии с ГОСТ Р МЭК 870-3 и при необходимости с дополнениями и рекомендациями МККТТ;
b) характеристики источников питания аппаратуры телемеханики в соответствии с ГОСТ Р МЭК 870-2-1.
5.3.3 Оконечная аппаратура цепи передачи данных (АПД) (на контролируемой станции и пункте управления):
a) характеристики интерфейса между АПД и каналом связи в соответствии с ГОСТ Р МЭК 870-3 и рекомендациями МККТТ;
b) требования к полосе частот и распределение частот в каналах передачи телемеханических данных;
c) характеристики источника питания устройств АПД, если это устройство не является неотъемлемой частью аппаратуры телемеханики.
5.3.4 Аппаратура телемеханики на пункте управления (ПУ) (и промежуточном пункте):
a) характеристики интерфейса между устройством телемеханики и оконечной аппаратурой цепи передачи данных (см. 5.3.2а);
b) характеристики интерфейса между аппаратурой оператора и устройством телемеханики;
c) характеристики интерфейса между устройством телемеханики и ЭВМ процесса или другим оборудованием на более высоком иерархическом уровне;
d) характеристики источника питания устройства телемеханики;
e) характеристики источника питания аппаратуры оператора.
5.4 Требования к источникам питания (в соответствии с ГОСТ Р МЭК 870-2-1).
5.4.1 Контролируемый пункт (КП):
а) источник питания постоянного или переменного тока (для энергетических компаний обычно предпочтительнее отдельные батареи, чтобы обеспечить работу системы телемеханики во время повреждений в сети переменного тока);
b) требования к номинальным напряжениям;
c) требования к емкости батареи, имея в виду потребление мощности системой телемеханики;
d) условия и требования к заземлению источника питания;
e) условия максимально допустимой продолжительности перерыва питания, например, во время переключений;
f) если батарея, питающая устройство телемеханики, одновременно питает другое оборудование, например, телефон или местную аппаратуру управления, то должны быть рассмотрены и ограничены взаимные влияния между системой телемеханики и другими системами в соответствии с ГОСТ Р МЭК 870-2-1.
5.4.2 Пункт управления (ПУ)
Имеет обычно источник гарантированного питания (UPS) переменного тока, поддерживающий питание через батарею достаточно большой емкости. Требуемые данные:
a) номинальные входные напряжения и допустимые отклонения от них;
b) допустимое время перерыва питания в системе UPS;
c) потребление энергии;
d) емкость батареи системы UPS.
5.5 Механические характеристики
5.5.1 Механические характеристики устройств:
монтируются в корпусе (в шкафу);
монтируются на стойке;
монтируются в корпусах, укрепленных на стене.
5.5.2 Пространство, требуемое для установки оборудования
Следует определить требования доступа (только спереди или спереди и сзади).
5.5.3 Другие условия, необходимые для установки всей системы
Тип соединительного кабеля стоек.
Расположение стоек.
Трасса кабельных каналов и т.п.
5.6 Условия перевозки
Необходимо проверить, соответствуют ли выбранные классы устойчивости к механическим и атмосферным воздействиям, условиям транспортирования оборудования (железнодорожный транспорт, пароход, воздушный транспорт или специальная перевозка на грузовых автомобилях). В противном случае необходима специальная упаковка.
5.7 Испытания системы и процедуры проверки
Это должно быть определено на ранней стадии.
5.8 Условия эксплуатации, гарантии
Условия эксплуатации для начала и конца гарантийного срока должны быть согласованы между пользователем и изготовителем.