ГОСТ Р МЭК 60870-5-101-2006
Группа П77
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 5
Протоколы передачи
Раздел 101
Обобщающий стандарт по основным функциям телемеханики
Telecontrol equipment and systems.
Part 5. Transmission protocol.
Section 101. Companion standard for basic telecontrol tasks
ОКС 33.200
ОКП 42 3200
Дата введения 2006-09-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 ПОДГОТОВЛЕН ОАО "Научно-исследовательский институт электроэнергетики" (ОАО ВНИИЭ) на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 396 "Автоматика и телемеханика"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 марта 2006 г. N 46-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 60870-5-101:2003 "Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 101. Обобщающий стандарт по основным функциям телемеханики" (IEC 60870-5-101:2003 "Telecontrol equipment and systems. Part 5. Transmission protocol. Section 101. Companion standard for basic telecontrol tasks").
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении А
5 ВЗАМЕН ГОСТ Р МЭК 870-5-101-2001
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
1 Область применения
Настоящий стандарт из серии стандартов МЭК 60870-5 распространяется на устройства и системы телемеханики с передачей данных последовательными двоичными кодами для контроля и управления территориально распределенными процессами. Раздел 101 является обобщающим стандартом по основным функциям телемеханики, что дает возможность взаимодействия различной совместимой аппаратуры телемеханики. Настоящий стандарт обобщает взаимоотношения между стандартами МЭК 60870-5-1 - МЭК 60870-5-5 и представляет правила построения функциональных профилей для основных телемеханических задач.
Настоящий стандарт определяет ASDU* с метками времени СР24Время2а, которые включают три байта времени в двоичном коде от миллисекунд до минут. Кроме того, в настоящем стандарте определены ASDU с метками времени СР56Время2а, которые включают семь байтов времени в двоичном коде от миллисекунд до лет (см. пункт 6.8 МЭК 60870-5-4 и 7.2.6.18 настоящего стандарта).
_______________
* ASDU - Блоки данных прикладного уровня.
ASDU с метками времени СР56Время2а используются, если пункт управления (ПУ) не может добавить время от часов до лет однозначно к получаемым ASDU с метками от миллисекунд до минут. Это может случиться при использовании сетей с неопределенными задержками или когда возникает временный сбой в сети.
Несмотря на то, что настоящий стандарт определяет наиболее важные пользовательские функции, кроме актуальных функций связи, он не может гарантировать полную совместимость и возможность совместной работы аппаратуры различных изготовителей. Обычно требуется дополнительное взаимное соглашение между заинтересованными компаниями в отношении методов использования определенных функций связи, принимая во внимание работу всей аппаратуры телемеханики.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие международные стандарты и документы:
МЭК 60870-1-1:1988 Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 1. Общие принципы
МЭК 60870-5-1:1990 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 1. Форматы передаваемых кадров
МЭК 60870-5-2:1992 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 2. Процедуры в каналах передачи
МЭК 60870-5-3:1992 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 3. Общая структура данных пользователя
МЭК 60870-5-4:1993 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 4. Определение и кодирование элементов пользовательской информации
МЭК 60870-5-5:1995 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 5. Основные прикладные функции
МЭК 60870-5-103:1997 Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 103. Обобщенный стандарт по информационному интерфейсу для аппаратуры релейной защиты
ИСО/МЭК 8824-1:2000 Информационная технология. Абстрактная синтаксическая нотация версии один (АСН.1). Часть 1. Спецификация основной нотации
Рекомендация МСЭ-Т V.24:1993 Перечень определений линий стыка между оконечным оборудованием данных (ООД) (DTE) и аппаратурой окончания канала данных (АКД) (DCE)
Рекомендация МСЭ-Т V.28:1993 Электрические характеристики несимметричных цепей стыка, работающих двухполюсным током
Рекомендация МСЭ-Т Х.24:1988 Перечень определений цепей стыка между ООД и АКД в сетях данных общего пользования
Рекомендация МСЭ-Т Х.27:1988 Электрические характеристики симметричных цепей стыка, работающих двухполюсным током, используемых в аппаратуре на интегральных схемах в области передачи данных
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 обобщающий стандарт (companion standard): Стандарт, добавляющий семантику к определениям базового стандарта или функционального профиля; это может выражаться определением конкретного использования объектов информации или определением дополнительных объектов информации, сервисных процедур и параметров базовых стандартов.
Примечание - Обобщающий стандарт не меняет стандартов, к которым он относится, но проясняет взаимоотношения между ними при их совместном использовании в определенной области.
3.2 группа (объектов информации) [group (for information objects)]: Это выборка из ОБЩИХ АДРЕСОВ или АДРЕСОВ ИНФОРМАЦИИ, которая специально определяется для конкретных систем.
3.3 направление управления (control direction): Направление передачи от контролирующей станции к контролируемой станции.
3.4 направление контроля (monitor direction): Направление передачи от контролируемой станции к контролирующей станции.
3.5 параметр системы (system parameter): Параметр, действительный для всей системы телемеханики, использующей настоящий обобщающий стандарт; система телемеханики состоит из нескольких контролирующих и контролируемых станций, которые могут быть соединены сетями различной конфигурации.
3.6 параметр, характерный для сети (network-specific parameter): Параметр, определяющий сеть и действительный для всех станций, соединенных сетями определенной конфигурации.
3.7 параметр, характерный для станции (station-specific parameter): Параметр, определяющий станцию и действительный для определенных станций.
3.8 параметр, характерный для объекта (object-specific parameter): Параметр, определяющий объект и действительный для отдельного объекта информации или определенной группы информационных объектов.
4 Основные правила
Настоящий пункт представляет основные правила построения обобщающих стандартов для протоколов передачи систем телемеханики, использующих протоколы стандартов серии МЭК 60870-5. Эти правила приведены в нижеследующих подпунктах.
4.1 Структура протокола
Протоколы стандартов серии МЭК 60870-5 основаны на трехуровневой модели "Структура повышенной производительности" (ЕРА), определенной в пункте 4 МЭК 60870-5-3.
Физический уровень использует рекомендации МСЭ-Т, что соответствует модели двоичного симметричного канала без памяти в требуемой среде, чтобы сохранить высокий уровень достоверности данных при блочном кодировании на канальном уровне.
Канальный уровень содержит ряд процедур передачи по каналу, в явной форме использующих УПРАВЛЯЮЩУЮ ИНФОРМАЦИЮ КАНАЛЬНОГО ПРОТОКОЛА (LPCI), что дает возможность передавать БЛОКИ ДАННЫХ ПРИКЛАДНОГО УРОВНЯ (ASDU) как данные пользователя канала. Канальный уровень использует выбор форматов кадра, чтобы обеспечить требуемую достоверность, эффективность и удобство передачи.
Прикладной уровень содержит ряд "Прикладных функций", включающих передачу БЛОКОВ ДАННЫХ ПРИКЛАДНОГО УРОВНЯ между источником и получателем.
Прикладной уровень настоящего обобщающего стандарта не использует в явном виде УПРАВЛЯЮЩУЮ ИНФОРМАЦИЮ ПРОТОКОЛА ПРИКЛАДНОГО УРОВНЯ (APCI). Эта информация содержится в составе поля ИДЕНТИФИКАТОРА БЛОКА ДАННЫХ ASDU и в типе используемого канального сервиса.
На рисунке 1 показана модель структуры повышенной производительности (ЕРА) и выбранные стандартные определения настоящего обобщающего стандарта.
Рисунок 1 - Выбранные стандартные определения настоящего стандарта
| Выбранные прикладные функции по МЭК 60870-5-5 | Процесс пользователя |
| Выбранные прикладные элементы информации по МЭК 60870-5-4 | Прикладной (уровень 7) |
| Выбранные блоки данных прикладного уровня по МЭК 60870-5-3 | |
| Выбранные процедуры передачи по каналу по МЭК 60870-5-2 | Канальный (уровень 2) |
| Выбранные форматы кадра передачи по МЭК 60870-5-1 | |
| Выбранные рекомендации МСЭ-Т | Физический (уровень 1) |
Рисунок 1 - Выбранные стандартные определения настоящего стандарта
4.2 Физический уровень
В настоящем стандарте приведены рекомендации МСЭ-Т, которые определяют интерфейсы между аппаратурой окончания канала данных (АКД) и оконечным оборудованием данных (ООД) на контролирующей (ПУ - Пункт управления) и контролируемой (КП - Контролируемый пункт) станциях (см. рисунок 2 настоящего стандарта и рисунок 2 МЭК 60870-1-1).
Рисунок 2 - Интерфейсы и соединения между ПУ и КП
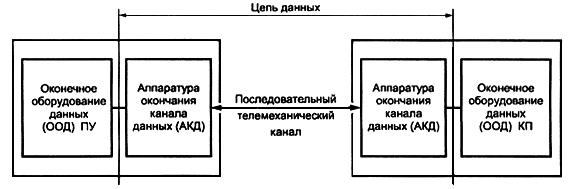
Рисунок 2 - Интерфейсы и соединения между ПУ и КП
Стандартным интерфейсом между ООД и АКД является асинхронный интерфейс по рекомендациям МСЭ-Т V.24 и МСЭ-Т V.28. Использование требуемых сигналов интерфейса зависит от режима работы используемого канала передачи. Настоящий стандарт определяет выбор цепей (сигналов) обмена, которые могут быть использованы, но не все из них являются необходимыми.
Примечание - Следует избегать методов передачи данных, улучшающих использование полосы частот данного канала передачи, если не будет доказано, что используемый метод (обычно нарушающий требуемые принципы кодирования для канала без памяти) не уменьшает достоверность данных при методе кодирования блока данных выбранного формата кадра на канальном уровне.
4.3 Канальный уровень
МЭК 60870-5-2 предлагает выбор процедур передачи по каналу с использованием поля управления и необязательного поля адреса. Канал между станциями может работать в балансном или небалансном режиме. Соответствующие функциональные коды для поля управления определяются для обоих режимов работы.
Если каналы от ПУ к нескольким КП используют общий физический канал, то эти каналы должны работать в небалансном режиме, чтобы исключить возможность попыток более чем одного КП передавать по каналу одновременно. Последовательность, с которой различным КП разрешен доступ к передаче по каналу, определяется процедурой прикладного уровня на ПУ (см. подпункт 6.2 "Сбор данных при помощи опроса" МЭК 60870-5-5).
Настоящий стандарт определяет, используется ли небалансный или балансный режим передачи; какие канальные процедуры (и соответствующие функциональные коды) должны применяться.
Настоящий стандарт определяет однозначный адрес (номер) для каждого соединения. Каждый адрес может быть единственным внутри данной системы или единственным внутри группы каналов, использующих общий канал. Последнее требует меньшего адресного поля, но ПУ должен устанавливать соответствие между адресами и номером канала.
Настоящий стандарт дает возможность определить один формат кадра, выбранный из нескольких форматов, предлагаемых стандартом МЭК 60870-5-1. Выбранный формат должен обеспечивать требуемую достоверность вместе с максимальной эффективностью, возможной при приемлемом уровне удобства выполнения. Кроме того, настоящий стандарт определяет выдержку тайм-аута ![]() на первичной станции и максимально допустимое время реакции
на первичной станции и максимально допустимое время реакции ![]() на вторичной станции для всех каналов [см. МЭК 60870-5-2 (приложение А, пункт А.1 в части деталей выбора временных параметров канала)].
на вторичной станции для всех каналов [см. МЭК 60870-5-2 (приложение А, пункт А.1 в части деталей выбора временных параметров канала)].
4.4 Прикладной уровень
Настоящий стандарт определяет соответствующие ASDU из общей структуры, заданной МЭК 60870-5-3. Эти ASDU построены с применением определений и кодовых обозначений для прикладных элементов информации, заданных МЭК 60870-5-4.
Настоящий стандарт определяет также один выбранный порядок передачи полей прикладных данных (см. МЭК 60870-5-4, подпункт 4.10). Чтобы обеспечить максимально общий подход к программированию на различных ЭВМ телемеханических станций, должен быть выбран порядок передачи многобайтовых полей (режим 1 или режим 2).
4.5 Прикладной процесс
МЭК 60870-5-5 представляет собой набор основных прикладных функций. Настоящий стандарт содержит один или несколько примеров таких функций, выбранных для обеспечения необходимого набора прикладных процедур ввода/вывода, соответствующего требованиям систем телемеханики.
5 Физический уровень
5.1 Выдержки из стандартов ИСО и МСЭ-Т
Имеются следующие фиксированные структуры сети:
- точка-точка;
- радиальная точка-точка;
- многоточечная радиальная;
- магистральная (цепочечная);
- многоточечная кольцевая.
Действительно подмножество, приведенное в рекомендациях МСЭ-Т V.24 и V.28, определенное в МЭК 60870-1-1.
В случае цифровой передачи, использующей дискретный мультиплексор, интерфейс по рекомендациям МСЭ-Т Х.24 и Х.27 может быть применен по специальной договоренности для каналов до 64 кбит/с (см. 5.1.2).
В настоящем стандарте "Цепь данных" рассматривается отдельно от телемеханических станций, т.к. она часто реализуется в виде отдельной аппаратуры. Настоящий стандарт включает полную спецификацию интерфейса ООД/АКД, но для соответствующей АКД дана только спецификация требований.
5.1.1 Несимметричные цепи обмена по рекомендациям МСЭ-Т V.24 и V.28
Настоящий стандарт определяет подмножество цепей по рекомендации МСЭ-Т V.24 с использованием уровней сигналов, определенных в рекомендации МСЭ-Т V.28.
Таблица 1 - Выдержки из рекомендаций МСЭ-Т V.24 и V.28
| Номер цепи обмена | Назначение цепи обмена | От АКД | К АКД |
| 102 | Сигнальное заземление или общий обратный провод | | |
| 103 | Передаваемые данные | | + |
| 104 | Принимаемые данные | + | |
| 105* | Запрос передачи | | + |
| 106** | Готовность к передаче | + | |
| 107** | Приемник данных АКД готов | + | |
| 108* | ООД готово | | + |
| 109** | Детектор принимаемого линейного сигнала | + | |
| * Может иметь постоянный потенциал. | |||
Стандартные скорости передачи могут быть определены отдельно для направления передачи и направления приема. Установлены следующие скорости передачи.
Стандартные скорости передачи для интерфейса с частотной модуляцией по рекомендациям МСЭ-Т V.24 и V.28 должны быть:
- 100 бит/с
- 200 бит/с
- 300 бит/с
- 600 бит/с
- 1,2 кбит/с.
Стандартные скорости передачи для интерфейса МОДЕМ по рекомендациям МСЭ-Т V.24 и V.28 должны быть:
- 300 бит/с
- 600 бит/с
- 1,2 кбит/с
- 2,4 кбит/с*
- 4,8 кбит/с*
- 9,6 кбит/с*.
_______________
* См. примечание к подпункту 4.2.
Стандартные скорости передачи для мультиплексоров дискретных сигналов (используемых асинхронно) такие же, как для интерфейса МОДЕМ.
5.1.2 Симметричные цепи обмена по рекомендациям МСЭ-Т Х.24 и Х.27
В таблице 2 приведен перечень симметричных интерфейсных цепей по рекомендациям МСЭ-Т Х.24 и Х.27 (используемых при синхронном методе передачи) для мультиплексоров дискретных сигналов. Интерфейсы МСЭ-Т Х.24 и Х.27 работают с симметричными дифференциальными сигналами и предназначены для скорости 64 кбит/с.
Таблица 2 - Выдержки из рекомендаций МСЭ-Т Х.24 и Х.27 для интерфейсов с синхронными мультиплексорами дискретных сигналов
| Цепь обмена | Назначение цепи обмена | От АКД | К АКД |
| G | Сигнальное заземление или общий обратный провод | | |
| Т | Передача | | + |
| R | Прием | + | |
| С* | Управление | | + |
| I* | Индикация | + | |
| S | Синхронизация элементов сигнала | + | |
| * Если ООД подсоединено к мультиплексору дискретных сигналов, то сигналы управления и индикации необязательны. Однако эти сигналы могут использоваться для целей контроля. | |||
Стандартные скорости передачи могут быть определены отдельно для направления передачи и направления приема. Установлены следующие скорости передачи:
- 2,4 кбит/с
- 4,8 кбит/с
- 9,6 кбит/с
- 19,2 кбит/с
- 38,4 кбит/с
- 56 кбит/с
- 64 кбит/с.
5.1.3 Интерфейсы для коммутируемых сетей связи
Настоящий стандарт не определяет применений, использующих коммутируемые сети связи.
5.1.4 Другие совместимые интерфейсы
Другие физические интерфейсы, кроме рекомендуемых в серии стандартов МЭК 60870-5, могут использоваться по согласованию между изготовителем и пользователем. Однако если используются другие интерфейсы, то изготовитель и пользователь должны удостовериться в их функциональности и совместимости.
6 Канальный уровень
В настоящем пункте используются следующие стандарты:
МЭК 60870-5-1 "Форматы передаваемых кадров";
МЭК 60870-5-2 "Процедуры в каналах передачи".
6.1 Применение требований МЭК 60870-5-1 "Форматы передаваемых кадров"
Настоящий стандарт допускает исключительно формат кадра FT1.2, определенный в МЭК 60870-5-1 (подпункт 6.2.4.2). Допускается формат как с фиксированной, так и с переменной длиной блока, а также передача единичного управляющего символа 1. Если передаются ASDU, то должен использоваться формат с переменной длиной блока. Если ASDU не передаются, то должен использоваться формат с фиксированной длиной блока или единичный символ.
Примечания
1 Правила, определенные в МЭК 60870-5-1 (подпункт 6.2.4.2), должны быть полностью соблюдены.
2 Кадр FT1.2 основан на асинхронном методе передачи и состоит из 11 битовых символов. Каждый символ начинается стартовым битом "0" и заканчивается стоповым битом "1". Однако при использовании синхронного интерфейса, определенного выше в 5.1.2, элементы сигнала (биты) синхронизируются от АКД и передаются непрерывно. В этом случае кадр передается и принимается изохронно.
Правило передачи R3 (МЭК 60870-5-1, подпункт 6.2.4.2) определяет, что между символами кадра не разрешается иметь интервалы спокойного состояния линии. Этого невозможно достичь в ряде практических реализаций, особенно при высокой скорости передачи из-за неизбежного аппаратного или программного запаздывания.
Однако можно показать, что интервал спокойного состояния линии между символами, имеющий длительность не более чем длина одного передаваемого бита, не уменьшает достоверность кадра. Поэтому правило передачи R3 может быть ослаблено следующим: разрешен интервал между символами не более чем длительность одного передаваемого бита. Интервал между символами увеличивает время передачи информации, критичной ко времени (например, синхронизации часов), что уменьшает точность часов на контролируемой станции (КП).
Приемнику не требуется измерять интервал спокойного состояния линии между символами. Например, приемник может быть реализован с использованием микросхемы последовательного интерфейса (UART) без специального аппаратного или программного контроля длительности промежутков между символами в принимаемом кадре.
6.2 Применение требований МЭК 60870-5-2 "Процедуры в каналах передачи"
Максимальная длина кадров канального уровня устанавливается как фиксированный параметр системы (сети). При необходимости максимальная длина для каждого направления может быть различной.
Кадр фиксированной длины не содержит прикладных данных.
При необходимости применяются режимы передачи: ПОСЫЛКА/БЕЗ ОТВЕТА, ПОСЫЛКА/ПОДТВЕРЖДЕНИЕ и ЗАПРОС/ОТВЕТ. Интерфейс между канальным уровнем и пользователем услуг в настоящем стандарте не определяется.
6.2.1 Диаграммы переходов состояний
Настоящий подпункт детализирует базовые определения процедур в канале передачи, приведенные в МЭК 60870-5-2. Диаграммы переходов состояний применяются для более точного определения процедур, с тем чтобы канальные уровни, выполненные различными изготовителями, могли быть полностью совместимыми. Диаграммы переходов состояний представляют состояния (в данном случае для канального уровня, определенного МЭК 60870-5-2) и переходы из одного состояния в другое. Включаются действия: посылки кадра Тх и прием кадра Rx. Кроме состояний в настоящем подпункте описаны важные внутренние процессы.
Диаграммы переходов состояний (см. рисунки 5, 6, 8, 9) представлены в формате, определенном Грэди Бучем (Grady Booch) и Харелом (Harel). Разъяснение отдельных элементов показано на рисунке 3.
Рисунок 3 - Диаграмма переходов состояний

Рисунок 3 - Диаграмма переходов состояний
Обозначение in указывает действие, которое проводится, когда происходит переход в данное состояние. Переход в следующее состояние может быть обусловлен окончанием текущего состояния в случае, если не определено событие, вызывающее переход. При перечислении нескольких условий в квадратных скобках запятая соответствует логической операции И. В круглых скобках могут даваться пояснения, в том числе операнды к выполняемым действиям.
Система обозначений в диаграммах переходов состояний (см. рисунки 5, 6, 8, 9) следующая:
от FC0 до FC15 - функциональные коды от 0 до 15 (см. таблицы 1-4 МЭК 60870-5-2);
FCB - бит счета кадров;
FCV - бит счета кадров учитывается;
DFC - контроль потока данных;
ACD - запрос данных (бит требования запроса данных);
PRM - первичное сообщение;
SC - одиночный символ.
6.2.1.1 Процедуры небалансной передачи
В небалансных системах передачи КП вторичен (slave), ПУ - первичен (master).
В иерархических системах любой промежуточный узел является первичным в направлении к КП и вторичным в направлении к ПУ.
RES-биты (резерв) в поле управления не используются и должны иметь значение 0.
Адресное поле А канала - один или два байта, как определено фиксированным параметром системы. Номер адреса для общей (широковещательной) команды (всегда для режима ПОСЫЛКА/БЕЗ ОТВЕТА) - 255 (при однобайтовом адресе) или 65535 (при двубайтовом адресе). Режим ПОСЫЛКА/БЕЗ ОТВЕТА применяется для посылки пользовательских данных ко всем станциям (циркулярный адрес).
Групповые адреса не определяются.
В системах с опросом основная процедура передачи использует для режима ЗАПРОС/ОТВЕТ функциональный код 11 (запрос прикладных данных класса 2). Данные класса 1 указываются с помощью бита ACD, как определено МЭК 60870-5-2. Присвоение причин передачи двум классам определено в 7.4.2 настоящего стандарта. Вторичная станция, не имеющая готовых данных класса 2, может отвечать на запрос данных класса 2 данными класса 1.
Таблица 3 показывает допустимые комбинации для небалансных процедур канального уровня.
Таблица 3 - Допустимые комбинации для небалансных процедур канального уровня
| Функциональные коды и услуги в первичном направлении | Разрешенные функциональные коды и услуги во вторичном направлении |
| <0> Сброс удаленного канала | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <1> Сброс процесса пользователя | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <3> ПОСЫЛКА/ПОДТВЕРЖДЕНИЕ данных пользователя | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <4> ПОСЫЛКА/БЕЗ ОТВЕТА данных пользователя | Нет ответа |
| <8> ЗАПРОС доступа по требованию | <11> ОТВЕТ: состояние канала |
| <9> ЗАПРОС/ОТВЕТ. Запрос состояния канала | <11> ОТВЕТ: состояние канала |
| <10> ЗАПРОС/ОТВЕТ. Запрос данных пользователя класса 1 | <8> ОТВЕТ: данные пользователя или |
| <11> ЗАПРОС/ОТВЕТ. Запрос данных пользователя класса 2 | <8> ОТВЕТ: данные пользователя или |
Разрешены также ответы <14> "Услуги канала не работают" или <15> "Услуги канала не предусмотрены". Управляющий одиночный символ Е5 может быть применен вместо ПОЛОЖИТЕЛЬНОГО ПОДТВЕРЖДЕНИЯ фиксированной длины (вторичный функциональный код <0>) или ОТРИЦАТЕЛЬНОГО ОТВЕТА фиксированной длины (вторичный функциональный код <9>), за исключением тех случаев, когда имеется запрос данных класса 1 (ACD=1) или дальнейшие сообщения могут вызвать переполнение (DFC=1). Это показано на рисунках 5 и 6. Одиночный символ А2 не должен использоваться.
Для небалансных процедур передачи первичная станция содержит только первичный канальный уровень, а вторичная станция содержит только вторичный канальный уровень (рисунок 4). Одна первичная станция может быть соединена более чем с одной вторичной станцией. Совместимая связь между первичной станцией и отдельной вторичной станцией относится только к этим двум станциям. Процедура опроса данных с нескольких вторичных станций - локальная внутренняя функция первичной станции - не показана на рисунках 4-6. Соответственно эти диаграммы показывают только первичную станцию и одну вторичную станцию. В случае более чем одной вторичной станции первичная станция должна запоминать текущее состояние каждой вторичной станции.
Рисунок 4 - Небалансные процедуры передачи, первичный и вторичный канальные уровни
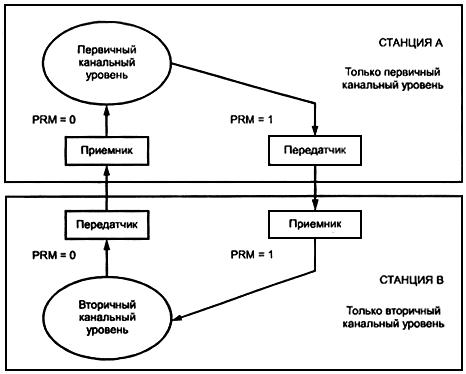
Рисунок 4 - Небалансные процедуры передачи, первичный и вторичный канальные уровни
Примечания к диаграммам переходов состояний:
1 Первичный канальный уровень относится к станции А, вторичный - к станции-партнеру В.
2 Примитивы обмена с пользователями REQ, IND, RESP, CON определены в МЭК 60870-5-2 (пункт 4).
3 Одиночный символ может быть использован вторичной станцией вместо FC0 или FC9, кроме случаев, когда ACD=1 или DFC=1.
4 Сервис FC1 в направлении от первичной станции не представлен.
5 ![]() - тайм-аут повторения передачи кадров первичной станцией.
- тайм-аут повторения передачи кадров первичной станцией. ![]() - интервал времени, в течение которого разрешены повторения. Вместо интервала времени может быть задано допустимое число повторений.
- интервал времени, в течение которого разрешены повторения. Вместо интервала времени может быть задано допустимое число повторений.
Рисунок 5 показывает диаграмму переходов состояний для первичной станции, а рисунок 6 - то же, для вторичной станции.
Рисунок 5 - Диаграмма переходов состояний для небалансной передачи: первичный канальный уровень
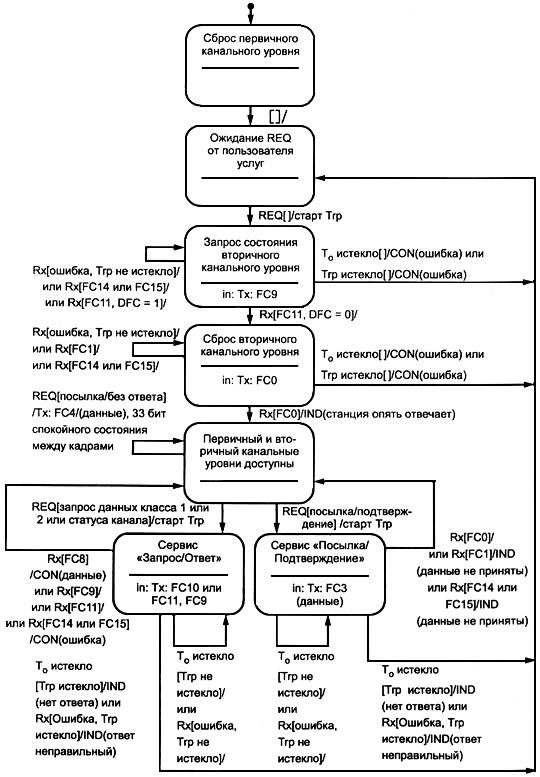
Рисунок 5 - Диаграмма переходов состояний для небалансной передачи: первичный канальный уровень
Рисунок 6 - Диаграмма переходов состояний для небалансной передачи: вторичный канальный уровень
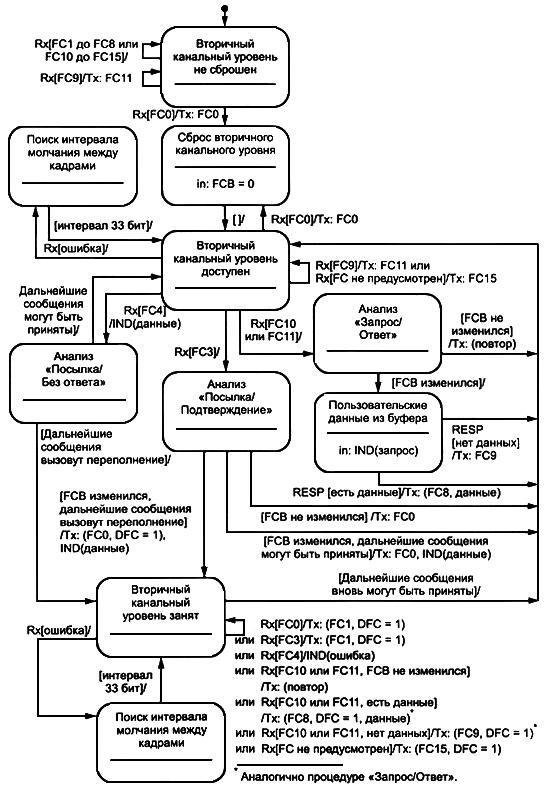
Рисунок 6 - Диаграмма переходов состояний для небалансной передачи: вторичный канальный уровень
6.2.1.2 Процедуры балансной передачи
На посылку любого стандартизованного функционального кода в первичном направлении (коды от 0 до 4 и код 9) должен быть получен положительный или отрицательный ответ. В случае непредусмотренной услуги вторичная станция отвечает функциональным кодом 15.
В таблице 4 показаны допустимые комбинации для услуг балансного канального уровня.
Таблица 4 - Допустимые комбинации для услуг балансного канального уровня
| Функциональные коды и услуги в первичном направлении | Разрешенные функциональные коды и услуги во вторичном направлении |
| <0> Сброс удаленного канала | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <1> Сброс процесса пользователя | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <2> ПОСЫЛКА/ПОДТВЕРЖДЕНИЕ функции тестирования канала | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <3> ПОСЫЛКА/ПОДТВЕРЖДЕНИЕ данных пользователя | <0> ПОЛОЖИТЕЛЬНОЕ ПОДТВЕРЖДЕНИЕ или |
| <4> ПОСЫЛКА/БЕЗ ОТВЕТА данных пользователя | Нет ответа |
| <9> ЗАПРОС/ОТВЕТ. Запрос состояния канала | <11> ОТВЕТ: Состояние канала |
Разрешены также ответы <14> - "Услуги канала не работают" или <15> - "Услуги канала не предусмотрены". Управляющий одиночный символ Е5 может быть применен вместо ПОЛОЖИТЕЛЬНОГО ПОДТВЕРЖДЕНИЯ фиксированной длины (вторичный функциональный код <0>), за исключением случая, когда дальнейшие сообщения могут вызвать переполнение (DFC=1).
Адресное поле А необязательно. Если оно определено, то состоит из одного или двух байтов (системный параметр). В балансных системах широковещательные команды не применяются. Бит RES в поле управления не используется и устанавливается в ноль.
Канальные уровни для балансных процедур передачи состоят из двух несвязанных логических процессов - один логический процесс представляет станцию А как первичную станцию, а станцию В как вторичную станцию. Другой логический процесс представляет станцию В как первичную станцию, а станцию А как вторичную станцию (каждая станция является комбинированной станцией). Таким образом, на каждой станции существуют два независимых процесса для управления канальным уровнем в логическом первичном и вторичном направлениях. Рисунок 7 показывает типовую организацию канального уровня, использующего балансные процедуры передачи.
Рисунок 7 - Балансная процедура передачи, первичный и вторичный канальные уровни
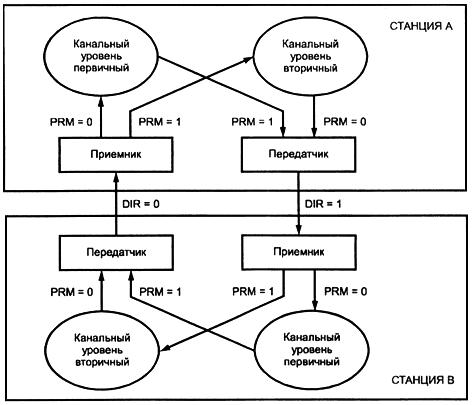
Рисунок 7 - Балансная процедура передачи, первичный и вторичный канальные уровни
Примечание - Физическое направление передачи фиксировано и определено при помощи бита DIR. Логические процессы - первичный или вторичный - могут меняться от станции А к станции В и наоборот. Первичное сообщение определяется значением бита PRM=1, вторичное сообщение - значением бита PRM=0 [см МЭК 60870-5-2 (подпункт 6.1.2)].
DIR определяет физическое направление передачи [см. МЭК 60870-5-2 (подпункт 6.1.2)]:
1 = от станции А (контролирующая) к станции В (контролируемая);
0 = от станции В (контролируемая) к станции А (контролирующая).
Все сообщения, посылаемые контролирующей станцией, имеют в поле управления канала данных бит DIR, установленный в 1. Все сообщения, посылаемые контролируемой станцией, должны иметь в поле управления канала бит DIR, установленный в 0.
Рисунок 8 - Диаграмма переходов состояний для балансной передачи: первичный канальный уровень
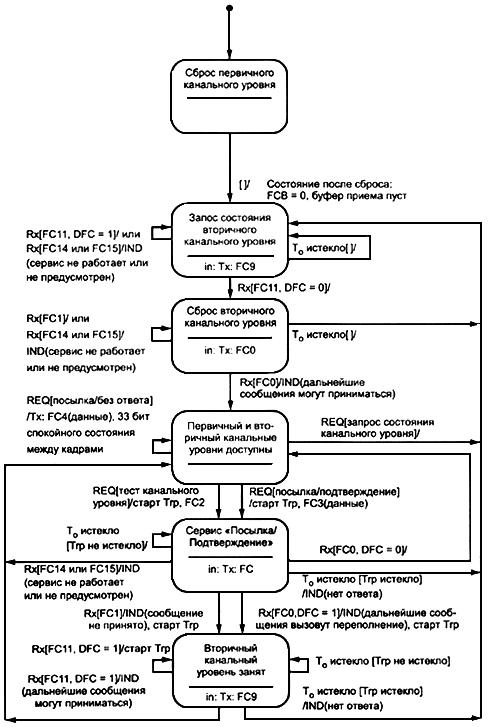
Рисунок 8 - Диаграмма переходов состояний для балансной передачи: первичный канальный уровень
В случае двух эквивалентных станций (например два пункта управления) значение DIR устанавливается по договоренности.
Если в балансном режиме определено использование поля адреса, оно должно содержать адрес получателя как в первичном, так и во вторичном сообщениях.
Рисунки 8 и 9 не показывают реакции канального уровня в случае приема искаженных кадров. Эти кадры обычно отбрасываются при помощи определенного процесса, который в настоящем стандарте не рассматривается. Этот процесс также отвечает за управление интервалом времени ожидания. На рисунке 8 показана диаграмма переходов состояний первичного канального уровня для балансных процедур передачи. На рисунке 9 - то же, для вторичного канального уровня.
Рисунок 9 - Диаграмма переходов состояний для балансной передачи: вторичный канальный уровень
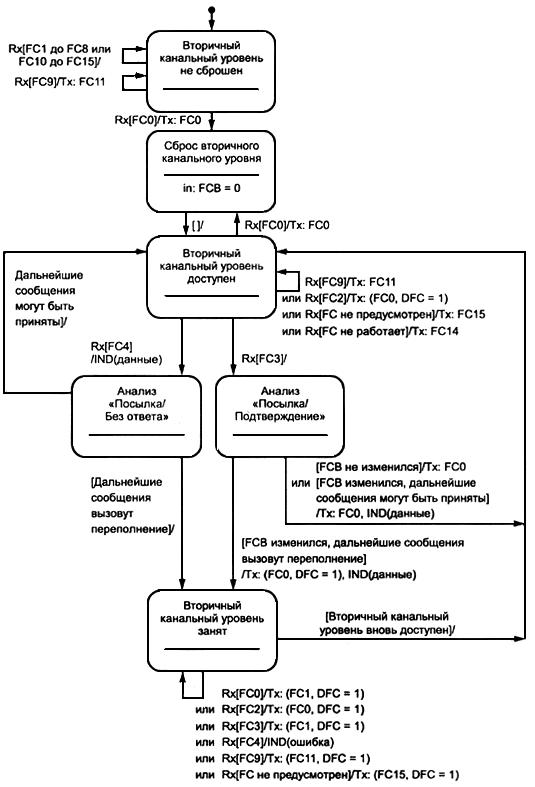
Рисунок 9 - Диаграмма переходов состояний для балансной передачи: вторичный канальный уровень
6.2.2 Определение интервала ожидания для повторной передачи кадра
Для расчета интервала ожидания (тайм-аута) при повторной передаче в МЭК 60870-5-2, приложение А, приведены формулы для двух случаев и различных конкретных параметров. Интервал ожидания, показанный на рисунке А.2 или А.4 приложения А (МЭК 60870-5-2) для случая 2, не используется. Используется интервал ожидания, показанный на рисунках А.2 и А.4 указанного стандарта для случая 1. Для каждой определенной комбинации скоростей передачи интервал ожидания ![]() является константой.
является константой.
Настоящий подпункт поясняет использование формул для расчета двух таблиц, которые дают примеры интервалов ожидания для ряда типовых условий как балансной, так и небалансной передачи.
Ссылки: МЭК 60870-5-2, приложение А - рисунок А.2, случай 1 (небалансные процедуры передачи);
МЭК 60870-5-2, приложение А - рисунок А.4, случай 1 (балансные процедуры передачи).
Аббревиатуры, не определенные в МЭК 60870-5-2:
BAB - скорость передачи от станции А к станции В;
ВВА - скорость передачи от станции В к станции А;
LBAmax - число байтов в наиболее длинном кадре от В к А;
LADDR - длина поля адреса канала;
ВАВ, ВВА, LBAmax, LADDR, ![]() и
и ![]() - параметры конкретного проекта.
- параметры конкретного проекта.
6.2.2.1 Небалансная передача
Следующие условия справедливы для интервала ожидания (тайм-аута) ![]() , рассчитанного по формуле:
, рассчитанного по формуле:
![]() , (1)
, (1)
где ![]() ,
,
где ![]() = время реакции станции В (характерное для каждого устройства);
= время реакции станции В (характерное для каждого устройства);
![]() 0,5/ВАВ (см. примечание ниже);
0,5/ВАВ (см. примечание ниже);
![]() 0,5/ВВА (см. примечание ниже);
0,5/ВВА (см. примечание ниже);
![]() 11хLBAmax/BBA.
11хLBAmax/BBA.
Примеры значений интервала ожидания ![]() в зависимости от длины кадра, скорости передачи и других параметров приведены в таблице 5.
в зависимости от длины кадра, скорости передачи и других параметров приведены в таблице 5.
Таблица 5 - Интервал ожидания ![]() при небалансной передаче в зависимости от длины кадра, скорости передачи и других параметров (пример)
при небалансной передаче в зависимости от длины кадра, скорости передачи и других параметров (пример)
| LBAmax | Скорость передачи, бит/с |
|
|
|
| 20 | 100 | 60,0 | 2200,0 | 2260,0 |
| 600 | 51,7 | 366,7 | 418,4 | |
| 1200 | 50,8 | 183,3 | 234,1 | |
| 9600 | 50,1 | 22,9 | 73,0 | |
| 19200 | 50,0 | 11,4 | 61,4 | |
| 64000 | 50,0 | 3,4 | 53,4 | |
| 240 | 100 | 60,0 | 26400,0 | 26460,0 |
| 600 | 51,7 | 4400,0 | 4451,7 | |
| 1200 | 50,8 | 2200,0 | 2250,8 | |
| 9600 | 50,1 | 275,0 | 325,1 | |
| 19200 | 50,0 | 137,5 | 187,5 | |
| 64000 | 50,0 | 41,3 | 91,3 |
| Определения: | Станция В = Контролируемая станция. | |||
| Скорости передачи одинаковы в обоих направлениях. | ||||
| Время реакции станции В | ||||
Примечание - Запаздывание сигнала ![]() и
и ![]() (см. МЭК 60870-5-2, приложение А) предполагается равным половине времени передачи битов данных.
(см. МЭК 60870-5-2, приложение А) предполагается равным половине времени передачи битов данных.
6.2.2.2 Балансная передача
Следующие условия справедливы для интервала ожидания ![]() , рассчитываемого по формуле
, рассчитываемого по формуле
![]() , (2)
, (2)
где ![]() ,
,
где ![]() время реакции станции В (характерное для каждого устройства);
время реакции станции В (характерное для каждого устройства);
![]() 0,5/ВАВ (см. примечание ниже);
0,5/ВАВ (см. примечание ниже);
![]() 0,5/ВВА (см. примечание ниже);
0,5/ВВА (см. примечание ниже);
![]() 33/ВВА*;
33/ВВА*;
_______________
* ![]() 33 бит является критическим (предельным) случаем для определения
33 бит является критическим (предельным) случаем для определения ![]() .
.
![]() - это системный параметр, который может быть существенно менее 33 бит (например 0,5 бита).
- это системный параметр, который может быть существенно менее 33 бит (например 0,5 бита).
![]() 11хLBAmax/BBA;
11хLBAmax/BBA;
![]() 11(LADDR + 4)/BBA.
11(LADDR + 4)/BBA.
Примечание - Запаздывание сигналов ![]() и
и ![]() [см. МЭК 60870-5-2, (приложение А)] предполагается равным половине времени передачи битов данных.
[см. МЭК 60870-5-2, (приложение А)] предполагается равным половине времени передачи битов данных.
Примеры значений интервала ожидания ![]() в зависимости от длины кадра, скорости передачи и других параметров приведены в таблице 6.
в зависимости от длины кадра, скорости передачи и других параметров приведены в таблице 6.
Таблица 6 - Интервал ожидания ![]() при балансной передаче в зависимости от длины кадра, скорости передачи и параметров, определяемых проектом (пример)
при балансной передаче в зависимости от длины кадра, скорости передачи и параметров, определяемых проектом (пример)
| LBAmax | Скорость передачи, бит/с |
|
|
|
|
|
| 20 | 100 | 60,0 | 330,0 | 550,0 | 2200,0 | 3140,0 |
| 600 | 51,7 | 55,0 | 91,7 | 366,7 | 565,1 | |
| 1200 | 50,8 | 27,5 | 45,8 | 183,3 | 307,4 | |
| 9600 | 50,1 | 3,4 | 5,7 | 22,9 | 82,1 | |
| 19200 | 50,0 | 1,7 | 2,9 | 11,4 | 66,0 | |
| 64000 | 50,0 | 0,5 | 0,9 | 3,4 | 54,8 | |
| 240 | 100 | 60,0 | 330,0 | 550,0 | 26400,0 | 27340,0 |
| 600 | 51,7 | 55,0 | 91,7 | 4400,0 | 4598,4 | |
| 1200 | 50,8 | 27,5 | 45,8 | 2200,0 | 2324,1 | |
| 9600 | 50,1 | 3,4 | 5,7 | 275,0 | 334,2 | |
| 19200 | 50,0 | 1,7 | 2,9 | 137,5 | 192,1 | |
| 64000 | 50,0 | 0,5 | 0,9 | 41,3 | 92,7 |
| Определения: | Станция В = Контролируемая станция. | |||
| Скорости передачи одинаковы в обоих направлениях. | ||||
| Время реакции станции В | ||||
| Длина адресного поля LADDR=1. | ||||
6.2.3 Использование различных сбросов
МЭК 60870-5-2 определяет услуги: FC0 - сброс удаленного канала и FC1 - сброс процесса пользователя. Кроме этого настоящий стандарт и МЭК 60870-5-5 определяют удаленную процедуру инициализации, которая использует команду сброса процесса C_RP_NA_1 с идентификатором типа <105>.
Применение различных сбросов объясняется в таблице 7.
Таблица 7 - Действие различных сбросов
| Контролирующая станция. Уровень 7 и пользователь | Первичный канал | Вторичный канал | Контролируемая станция. Уровень 7 и пользователь |
| - | Сброс удаленного канала (FC0) | Сброс вторичного канала | - |
| - | Сброс процесса пользователя (FC1) | Сброс | Сброс |
| Команда сброса процесса | - | - | Сброс |
Сброс удаленного канала
используется, когда вторичный канал сбрасывается независимо от уровней, расположенных выше канального. В этом случае бит счета кадров в поле управления всегда устанавливается в ноль. Ожидающие сообщения вторичного канального уровня стираются.
Сброс процесса пользователя
как функция канального уровня используется, если уровень канала продолжает работать, а функции процесса на контролируемой станции отсутствуют. В этом случае сброс процесса пользователя через сервис канального уровня может запустить процесс пользователя в работу. Такой сервис (услуга) может использоваться только в том случае, если уровень канала может сбросить процесс пользователя при помощи отдельного сигнала.
Использование команды сброса процесса подробно определено в МЭК 60870-5-5 (подпункты 6.1.4 и 6.1.7).
7 Прикладной уровень и процесс пользователя
В настоящем пункте используются следующие стандарты:
МЭК 60870-5-3 "Общая структура данных пользователя";
МЭК 60870-5-4 "Определение и кодирование элементов пользовательской информации";
МЭК 60870-5-5 "Основные прикладные функции".
7.1 Применение требований МЭК 60870-5-3 "Общая структура данных пользователя"
МЭК 60870-5-3 описывает Основные Прикладные Блоки данных в кадрах передачи систем телемеханики. Настоящий подпункт выбирает отдельные элементы поля из указанного стандарта и определяет БЛОКИ ДАННЫХ ПРИКЛАДНОГО УРОВНЯ (ASDU), используемые в настоящем стандарте.
БЛОК ДАННЫХ КАНАЛЬНОГО УРОВНЯ (LPDU) в настоящем стандарте содержит не более одного ASDU.
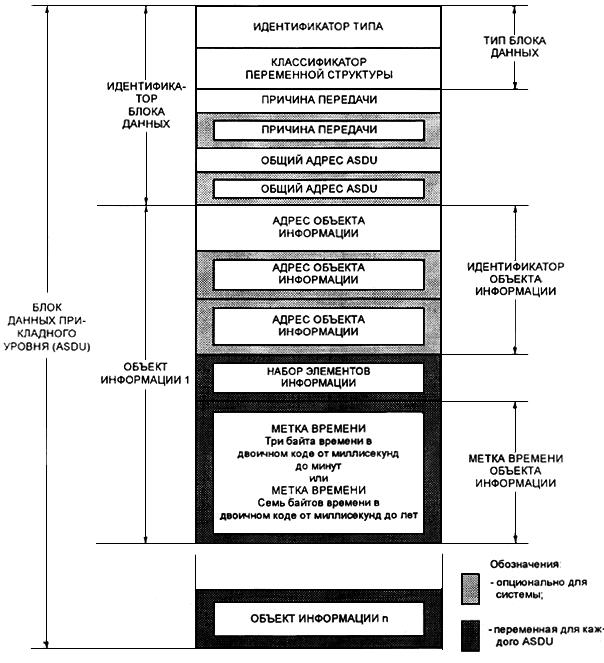
ASDU (см. рисунок 10) состоит из ИДЕНТИФИКАТОРА БЛОКА ДАННЫХ и одного или более ОБЪЕКТОВ ИНФОРМАЦИИ.
Рисунок 10 - Структура ASDU
| ИДЕНТИФИКАТОР БЛОКА ДАННЫХ | := | СР16+8а+8b{ИДЕНТИФИКАТОР ТИПА, КЛАССИФИКАТОР ПЕРЕМЕННОЙ СТРУКТУРЫ, ПРИЧИНА ПЕРЕДАЧИ, ОБЩИЙ АДРЕС} | ||||
| Фиксированный параметр | а | := | число байтов ОБЩЕГО АДРЕСА (1 или 2) | |||
| Фиксированный параметр | b | := | число байтов в ПРИЧИНЕ ПЕРЕДАЧИ (1 или 2) | |||
| ОБЪЕКТ ИНФОРМАЦИИ | := | СР8с+8d+8t{АДРЕС ОБЪЕКТА ИНФОРМАЦИИ, НАБОР ЭЛЕМЕНТОВ ИНФОРМАЦИИ, МЕТКА ВРЕМЕНИ (не обязательно)} | ||||
| Фиксированный параметр | с | := | число байтов в АДРЕСЕ ОБЪЕКТА ИНФОРМАЦИИ (1, 2 или 3) | |||
| Переменный параметр | d | := | число байтов в НАБОРЕ ЭЛЕМЕНТОВ ИНФОРМАЦИИ | |||
| Переменный параметр | t | := | 3 или 7 - если МЕТКА ВРЕМЕНИ присутствует, | |||
Рисунок 10 - Структура ASDU
ИДЕНТИФИКАТОР БЛОКА ДАННЫХ (ИБД) имеет всегда одинаковую структуру для всех ASDU. Все ОБЪЕКТЫ ИНФОРМАЦИИ, входящие в один ASDU, всегда имеют одинаковую структуру и тип, которые определены в поле ИДЕНТИФИКАТОРА ТИПА.
Структура ИДЕНТИФИКАТОРА БЛОКА ДАННЫХ следующая:
| - один байт | - ИДЕНТИФИКАТОР ТИПА; |
| - один байт | - КЛАССИФИКАТОР ПЕРЕМЕННОЙ СТРУКТУРЫ; |
| - один или два байта | - ПРИЧИНА ПЕРЕДАЧИ; |
| - один или два байта | - ОБЩИЙ АДРЕС ASDU. |
Размер ОБЩЕГО АДРЕСА ASDU определяется фиксированным параметром системы, в данном случае один или два байта. ОБЩИЙ АДРЕС - это адрес станции, который может быть структурирован, чтобы иметь возможность адресации ко всей станции или только к отдельному сектору станции.
Поле данных ДЛИНА ASDU отсутствует. Каждый кадр содержит только один ASDU. Длина ASDU определяется как длина кадра (указанная в поле длины канального протокола) минус фиксированное целое, зависящее от параметра системы:
1 - если нет адреса канального уровня;
2 - если адрес канального уровня один байт;
3 - если адрес канального уровня два байта.
МЕТКИ ВРЕМЕНИ (если присутствуют) всегда относятся к одиночному ОБЪЕКТУ ИНФОРМАЦИИ.
ОБЪЕКТ ИНФОРМАЦИИ состоит из ИДЕНТИФИКАТОРА ОБЪЕКТА ИНФОРМАЦИИ, НАБОРА ЭЛЕМЕНТОВ ИНФОРМАЦИИ и (если присутствует) МЕТКИ ВРЕМЕНИ ОБЪЕКТА ИНФОРМАЦИИ.
ИДЕНТИФИКАТОР ОБЪЕКТА ИНФОРМАЦИИ состоит только из АДРЕСА ОБЪЕКТА ИНФОРМАЦИИ. В большинстве случаев ОБЩИЙ АДРЕС ASDU вместе с АДРЕСОМ ОБЪЕКТА ИНФОРМАЦИИ характеризуют полный НАБОР ЭЛЕМЕНТОВ ИНФОРМАЦИИ внутри определенной системы. Комбинация обоих адресов должна быть однозначной для каждой системы. ИДЕНТИФИКАТОР ТИПА не является частью ОБЩЕГО АДРЕСА или АДРЕСА ОБЪЕКТА ИНФОРМАЦИИ.
НАБОР ЭЛЕМЕНТОВ ИНФОРМАЦИИ состоит из ОДИНОЧНОГО ЭЛЕМЕНТА ИНФОРМАЦИИ (КОМБИНАЦИИ ЭЛЕМЕНТОВ ИНФОРМАЦИИ) или ПОСЛЕДОВАТЕЛЬНОСТИ ОДИНОЧНЫХ ЭЛЕМЕНТОВ ИНФОРМАЦИИ (КОМБИНАЦИЙ ЭЛЕМЕНТОВ ИНФОРМАЦИИ).
Примечание - ИДЕНТИФИКАТОР ТИПА определяет структуру, тип и формат ОБЪЕКТА ИНФОРМАЦИИ. Все ОБЪЕКТЫ ИНФОРМАЦИИ данного ASDU имеют одинаковую структуру, тип и формат.
7.2 Применение требований МЭК 60870-5-4 "Определение и кодирование элементов пользовательской информации"
Размеры и содержание полей индивидуальной информации ASDU определяются в соответствии с правилами для элементов информации по МЭК 60870-5-4.
7.2.1 ИДЕНТИФИКАТОР ТИПА
Байт 1 ИДЕНТИФИКАТОРА БЛОКА ДАННЫХ - ИДЕНТИФИКАТОР ТИПА определяет структуру, тип и формат ОБЪЕКТА(ов) ИНФОРМАЦИИ данного блока ASDU.
ИДЕНТИФИКАТОР ТИПА определяется следующим образом:
ИДЕНТИФИКАТОР ТИПА := UI8[1..8]<1..255>
Рисунок 11 - ИДЕНТИФИКАТОР ТИПА

Рисунок 11 - ИДЕНТИФИКАТОР ТИПА
ОБЪЕКТЫ ИНФОРМАЦИИ с МЕТКОЙ ВРЕМЕНИ или без нее отличаются различными значениями ИДЕНТИФИКАТОРА ТИПА.
Контролирующая станция игнорирует ASDU с не определенным для данной системы значением идентификатора типа.
7.2.1.1 Определение семантики значений поля ИДЕНТИФИКАТОРА ТИПА
Значение "0" не используется. В настоящем стандарте определяется диапазон значений от 1 до 127. Диапазон от 128 до 255 не определяется. Значения ИДЕНТИФИКАТОРА ТИПА от 136 до 255 могут быть определены независимо друг от друга пользователями настоящего стандарта. Однако полная совместимость может быть достигнута только при использовании ASDU со значениями ИДЕНТИФИКАТОРА ТИПА от 1 до 127.
Таблицы 8-13, приведенные ниже, показывают определение значений ИДЕНТИФИКАТОРА ТИПА для прикладной и системной информации как в направлении контроля, так и в направлении управления. При стандартных операциях существует вертикальный поток информации между станциями в сети. Команды посылаются вниз от центральной контролирующей станции к одной из нескольких контролируемых станций, а события и измеряемые величины посылаются вверх от контролируемой станции к центральной контролирующей станции.
Таблица 8 - Семантика ИДЕНТИФИКАТОРА ТИПА
Информация о процессе в направлении контроля
ИДЕНТИФИКАТОР ТИПА := UI8[1..8]<0..44>
| <0> | := | не определяется | |
| <1> | := | одноэлементная информация | М_SP_NA_1 |
| <2> | := | одноэлементная информация с меткой времени | М_SP_ТА_1 |
| <3> | := | двухэлементная информация | М_DP_NA_1 |