ГОСТ 30097-93
Группа П70
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Роботы промышленные
СИСТЕМЫ КООРДИНАТ И НАПРАВЛЕНИЯ ДВИЖЕНИЙ
Industrial robots. Coordinate systems and motions
ОКС 25.040.30
ОКП 38 7500
Дата введения 1996-01-01
Предисловие
1 РАЗРАБОТАН Техническим комитетом N 69 "Системы промышленной автоматизации"
ВНЕСЕН Госстандартом России
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации 15.04.94 (отчет Технического секретариата N 2)
За принятие проголосовали:
Наименование государства | Наименование национального органа стандартизации |
Республика Армения | Армгосстандарт |
Республика Беларусь | Белстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Республика Молдова | Госдепартамент Молдовастандарт |
Российская Федерация | Госстандарт России |
Туркменистан | Туркменглавгосинспекция |
Украина | Госстандарт Украины |
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 24.05.95 N 266 межгосударственный стандарт ГОСТ 30097-93 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 января 1996 г.
4 ВВЕДЕН ВПЕРВЫЕ
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт устанавливает три системы координат промышленных роботов (далее - роботов), номенклатуру и обозначение осей и предназначен для использования при монтаже, испытании и программировании.
Требования настоящего стандарта являются обязательными, за исключением требований приложений А и Б.
2 НОРМАТИВНАЯ ССЫЛКА
В настоящем стандарте использована ссылка на следующий стандарт:
ГОСТ 25686-85 Манипуляторы, автооператоры и промышленные роботы. Термины и определения
3 ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Термины и определения - по ГОСТ 25686 и приложению А.
4 ОПРЕДЕЛЕНИЕ СИСТЕМ КООРДИНАТ
Системы координат должны соответствовать правилу правой руки (рисунок 1). Буквами ![]() ,
, ![]() и
и ![]() следует обозначать вращательные движения вокруг осей, параллельных соответственно осям координат
следует обозначать вращательные движения вокруг осей, параллельных соответственно осям координат ![]() ,
, ![]() и
и ![]() . Положительные направления
. Положительные направления ![]() ,
, ![]() и
и ![]() должны совпадать с направлением вращения винтов с правой резьбой при их завинчивании в положительных направлениях осей
должны совпадать с направлением вращения винтов с правой резьбой при их завинчивании в положительных направлениях осей ![]() ,
, ![]() и
и ![]() соответственно (рисунок 2).
соответственно (рисунок 2).
Рисунок 1 - Правая система координат
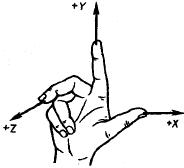
Рисунок 1 - Правая система координат
Рисунок 2 - Обозначения вращательных движений
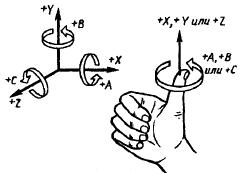
Рисунок 2 - Обозначения вращательных движений
Устанавливаются следующие системы координат:
- мировая;
- система координат основания;
- система координат механического интерфейса.
Каждая из систем координат определяется плоскостью ![]() , например оси
, например оси ![]() и
и ![]() системы координат основания лежат в установочной плоскости основания. Ось координат
системы координат основания лежат в установочной плоскости основания. Ось координат ![]() перпендикулярна плоскости
перпендикулярна плоскости ![]() . На рисунке 3 приведен пример трех координатных систем робота, подпадающих под действие настоящего стандарта.
. На рисунке 3 приведен пример трех координатных систем робота, подпадающих под действие настоящего стандарта.
Рисунок 3 - Системы координат
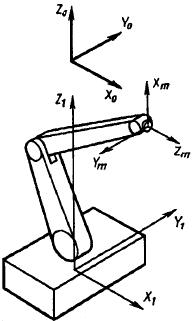
Рисунок 3 - Системы координат
Допускается применение других систем координат
5 МИРОВАЯ СИСТЕМА КООРДИНАТ
5.1 Обозначение![]()
5.2 Начало координат
Начало координат выбирается произвольно потребителем согласно своим требованиям.
5.3 Ось координат ![]()
Ось координат ![]() коллинеарна вектору ускорения силы тяжести и направлена в противоположную сторону.
коллинеарна вектору ускорения силы тяжести и направлена в противоположную сторону.
5.4 Ось координат ![]()
Ось координат ![]() выбирается произвольно потребителем согласно своим требованиям.
выбирается произвольно потребителем согласно своим требованиям.
6 СИСТЕМА КООРДИНАТ ОСНОВАНИЯ
6.1 Обозначение![]()
6.2. Начало координат
Начало базовой системы координат должно быть определено изготовителем.
6.3 Ось ![]()
Ось ![]() направлена перпендикулярно установочной плоскости основания в тело робота.
направлена перпендикулярно установочной плоскости основания в тело робота.
6.4 Ось ![]()
Ось ![]() должна проходить через проекцию центра
должна проходить через проекцию центра ![]() рабочего пространства на установочную плоскость основания (рисунок 4). Если это невозможно, то направление оси
рабочего пространства на установочную плоскость основания (рисунок 4). Если это невозможно, то направление оси ![]() должно быть определено изготовителем.
должно быть определено изготовителем.
Рисунок 4 - Пример рабочего пространства робота
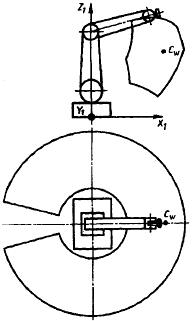
Рисунок 4 - Пример рабочего пространства робота
Примечание - В приложении Б приведены примеры задания системы координат основания и механического интерфейса и направления движений для роботов различных типов.
7 СИСТЕМА КООРДИНАТ МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА
7.1 Обозначение![]()
![]() ,
,
где ![]() - число осей.
- число осей.
7.2 Начало координат
Начало координат должно располагаться в центре механического интерфейса.
7.3 Ось координат ![]()
Ось координат ![]() направлена от механического интерфейса к концу рабочего органа.
направлена от механического интерфейса к концу рабочего органа.
7.4 Ось координат ![]()
Ось координат ![]() находится на пересечении механического интерфейса и плоскости
находится на пересечении механического интерфейса и плоскости ![]() или ей параллельной при среднем положении робота по всем осям. Если это невозможно, положение оси
или ей параллельной при среднем положении робота по всем осям. Если это невозможно, положение оси ![]() должно быть определено изготовителем.
должно быть определено изготовителем.
Если оси ![]() и
и ![]() не коллинеарны, ось
не коллинеарны, ось ![]() должна быть направлена в стороны от оси
должна быть направлена в стороны от оси ![]() ; если они коллинеарны, то направление оси
; если они коллинеарны, то направление оси ![]() выбирается таким же, как и оси
выбирается таким же, как и оси ![]() .
.
8 ДВИЖЕНИЯ
8.1 Прямолинейные движения
Если прямолинейные движения рабочего органа задаются в базовой системе координат основания, то они обозначаются ![]() ,
, ![]() ,
, ![]() :
:![]() - вдоль или параллельно оси
- вдоль или параллельно оси ![]() ;
;![]() - вдоль или параллельно оси
- вдоль или параллельно оси ![]() ;
;![]() - вдоль или параллельно оси
- вдоль или параллельно оси
![]() .
.
8.2 Вращательные движения
Обозначаются, как указано в разделе 4.
9 ОБОЗНАЧЕНИЯ ОСЕЙ
Если оси обозначаются числами, то ось 1 должна обозначать первое движение, ближайшее к установочной плоскости основания, ось 2 - следующее за ним движение и т.д., ось ![]() - движение звена, к которому крепится или на котором находится механический интерфейс.
- движение звена, к которому крепится или на котором находится механический интерфейс.
Примечание - Примеры обозначения осей приведены в приложении Б.
ПРИЛОЖЕНИЕ А (справочное). Термины, применяемые в настоящем стандарте, и их пояснения
ПРИЛОЖЕНИЕ А
(справочное)
Термин | Пояснение |
Рука (первичные оси) | Взаимосвязанная совокупность звеньев и кинематических пар, включая звенья удлиненной формы, поддерживающая, перемещающая и ориентирующая запястье или рабочий орган |
Запястье (вторичные оси) | Взаимосвязанная совокупность звеньев и кинематических пар между рукой и рабочим органом, которая поддерживает, перемещает и ориентирует рабочий орган |
Основание | Платформа или конструкция, к которой крепится начало первого звена исполнительного устройства |
Установочная плоскость основания | Плоскость соприкосновения робота с местом его установки, в которой определяется система координат основания |
Механический интерфейс | Установочная поверхность на конце исполнительного устройства, к которой присоединяется рабочий орган |
Ось | Направление, в котором звено робота может совершать прямолинейное или вращательное движение. Количество осей обычно равно количеству управляемых звеньев с независимым приводом |
Мировая система координат | Система координат, связанная с землей или полом цеха |
Система координат основания | Система координат, связанная с основанием робота |
Система координат механического интерфейса | Система координат, связанная с механическим интерфейсом |
Система координат звена | Система координат, в которой задается положение какого-либо звена (обычно по отношению к системе координат, связанной с предыдущим звеном, или к некоторой другой координатной системе) |
ПРИЛОЖЕНИЕ Б (рекомендуемое). ПРИМЕРЫ ЗАДАНИЯ СИСТЕМЫ КООРДИНАТ ОСНОВАНИЯ И МЕХАНИЧЕСКОГО ИНТЕРФЕЙСА И НАПРАВЛЕНИЯ ДВИЖЕНИЙ ДЛЯ РОБОТОВ РАЗЛИЧНЫХ ТИПОВ
ПРИЛОЖЕНИЕ Б
(рекомендуемое)
Примеры задания системы координат основания и механического интерфейса и направления движений для роботов различных типов указаны на рисунках Б.1-Б.5.
Рисунок Б.1 - Робот, работающий в прямоугольной системе координат
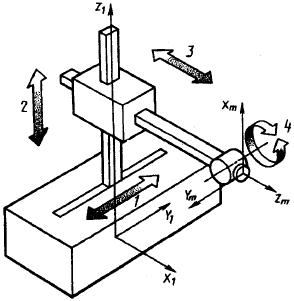
Рисунок Б.1 - Робот, работающий в прямоугольной системе координат
Рисунок Б.2 - Робот, работающий в цилиндрической системе координат
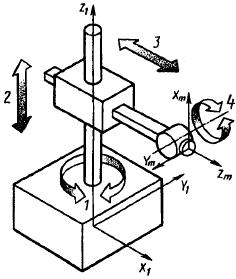
Рисунок Б.2 - Робот, работающий в цилиндрической системе координат
Рисунок Б.3 - Робот, работающий в полярной системе координат
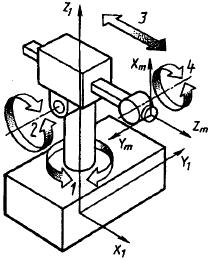
Рисунок Б.3 - Робот, работающий в полярной системе координат
Рисунок Б.4 - Робот с шарнирной (антропоморфной) рукой
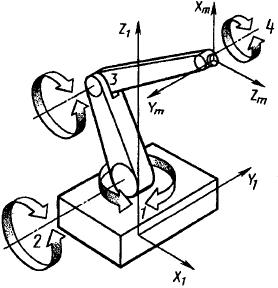
Рисунок Б.4 - Робот с шарнирной (антропоморфной) рукой
Рисунок Б.5 - Робот, работающий в полярной системе координат
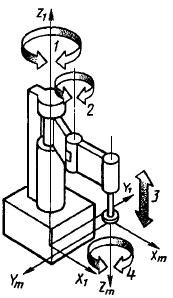
Рисунок Б.5 - Робот, работающий в полярной системе координат