ГОСТ 28732-90
Группа П72
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
РОБОТЫ ПРОМЫШЛЕННЫЕ
Требования к организации внешних связей
с устройствами программного управления
Industrial robots. Requirements for organizing of external
connection to programmed control devices
МКС 25.040.30
ОКП 38 7500
Дата введения 1993-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством станкостроительной и инструментальной промышленности СССР
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 12.11.90 N 2810
3. Стандарт соответствует стандарту МЭК 807-2-85 в части, касающейся требований к разъемам
4. ВВЕДЕН ВПЕРВЫЕ
5. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, на который дана ссылка | Номер пункта, раздела |
ГОСТ 26642-85 | Разд.1 |
ГОСТ 27696-88 | 2.1, 2.5.3, 2.6 |
6. Ограничение срока действия снято по протоколу N 7-95 Межгосударственного совета по стандартизации, метрологии и сертификации (ИУС 11-95)
7. ПЕРЕИЗДАНИЕ. Март 2005 г.
Настоящий стандарт распространяется на интерфейсы вновь проектируемых устройств программного управления (УПУ) промышленных роботов по связи между:
1) УПУ и датчиками перемещений;
2) УПУ и пультом обучения;
3) УПУ и автономным электроприводом.
Стандарт устанавливает также ряд требований по организации параллельного интерфейса и интерфейса по связи УПУ с датчиками внешней информации.
Требования стандарта являются обязательными.
1. ОБЩИЕ ТРЕБОВАНИЯ
1. ОБЩИЕ ТРЕБОВАНИЯ
Требования к организации связей УПУ с внешними устройствами - по ГОСТ 26642.
2. СИГНАЛЫ СВЯЗИ УПУ С ВНЕШНИМИ УСТРОЙСТВАМИ
2.1. Сигналы связи УПУ с внешними устройствами - по ГОСТ 27696.
2.2. Тип разъемов для подключения сигналов входов и выходов при цифровом последовательном интерфейсе - А25 по приложению 1.
2.3. Параллельный интерфейс
2.3.1. Тип разъемов для подключения внешних устройств к УПУ по параллельному интерфейсу - А25 по приложению 1.
2.3.2. Распределение сигналов по контактам разъема приведено в табл.1.
Таблица 1
Номер контакта разъема | Обозначение сигнала | Направление подачи сигнала | Название сигнала |
1 |
| Выход | Стробирование |
2 |
| " | Данные |
3 |
| " | " |
4 |
| " | " |
5 |
| " | " |
6 |
| " | " |
7 |
| " | " |
8 |
| " | " |
9 |
| " | " |
10 |
| Вход | Подтверждение |
11 |
| " | Устройство занято |
12 |
| " | Конец бумаги |
13 |
| " | Готовность приемника |
14 |
| Выход | Автоматический перевод строки |
15 |
| Вход | Ошибка |
16 |
| Выход | Инициализация |
17 |
| " | Выбор устройства |
18-25 | GND | " | Общий |
2.4. Интерфейс УПУ - датчики перемещения
2.4.1. УПУ должно воспринимать сигналы от датчиков перемещения, преобразованные к единому виду, соответствующему сигналам фотоэлектрических датчиков (унитарный код в импульсном или аналоговом виде). Количество каналов определяется классом УПУ.
2.4.2. Интерфейс между УПУ и фотоэлектрическими датчиками должен включать:
1) прием трех пар сигналов;
2) прием сигналов неисправности;
3) выдачу сигналов напряжения питания;
4) прием опорного потенциала напряжения питания;
5) прием сигналов обратной связи по напряжению питания датчиков положения.
2.4.3. Тремя парами принимаемых сигналов являются:
1) ![]() и
и ![]() - для информации о перемещениях;
- для информации о перемещениях;
2) ![]() и
и ![]() - для информации о перемещениях;
- для информации о перемещениях;
3) ![]() и
и ![]() - для нулевой отметки.
- для нулевой отметки.
Указанные три пары сигналов должны быть дискретными с уровнями, соответствующими TTL-логике:![]() - от 2 до 5 В;
- от 2 до 5 В;![]() - от 0 до 0,8
- от 0 до 0,8
2.4.4. Сигнал неисправности ![]() соответствует высокому уровню TTL-логики. Он является дополнительным и может отсутствовать в отдельных УПУ.
соответствует высокому уровню TTL-логики. Он является дополнительным и может отсутствовать в отдельных УПУ.
2.4.5. Параметры сигналов напряжения питания должны быть 5 В, 250 мА - при нормальном режиме и ±15 В, 100 мА - по спецзаказу.
2.4.6. Регулировка питания датчиков перемещения должна обеспечивать удаление от УПУ не менее 50 м.
2.4.7. Тип разъемов для подключения датчиков перемещения - А15 по приложению 1.
Распределение сигналов по контактам разъема приведено в табл.2.
Таблица 2
Номер контакта разъема | Обозначение сигнала |
1 |
|
9 |
|
10 |
|
3 |
|
4 |
|
6 |
|
15 |
|
5 | От 5,0 B до 5,25 B |
14 | От 5,0 B до 5,25 B |
2 | 0 B |
11 | 0 B |
2.5. Интерфейс УПУ-датчики внешней информации
2.5.1. УПУ должно воспринимать сигналы от датчиков внешней информации, преобразованные к одному из уровней: TTL-логики или 24 В.
2.5.2. Интерфейс между УПУ и датчиками внешней информации включает:
1) прием одной пары дискретных сигналов ![]() и
и ![]() *;
*;
2) прием сигналов неисправности ![]() *;
*;
3) выдачу напряжения питания преобразовательного устройства 5 В и 24 В (по выбору);
4) прием опорного потенциала напряжения питания.
________________
* Сигналы являются дополнительными и могут отсутствовать в отдельных УПУ.
2.5.3. Для подключения датчиков внешней информации следует использовать следующие разъемы:
1) с 25 контактами - по ГОСТ 27696;
2) с 9 контактами - А9 по приложению 1.
Распределение сигналов по контактам разъема приведено в табл.3.
Таблица 3
Номер контакта разъема | Обозначение сигнала |
1 |
|
2 | +5 В; +24 В |
3 | - |
4 | OB |
5 | Экран |
6 |
|
7 |
|
8 | - |
9 | - |
2.5.4. Сигналы от датчиков внешней информации рекомендуется предварительно сформировать (например по логическому уровню).
2.6. Интерфейс УПУ - пульт обучения
Подключение пульта обучения следует проводить согласно требованиям к цифровому последовательному интерфейсу по ГОСТ 27696 и п.2.2 настоящего стандарта.
2.7. Интерфейс УПУ - автономный электропривод
Интерфейс по связи УПУ с автономным электроприводом должен иметь магистральную структуру.
Примеры интерфейсов с магистральной структурой приведены в приложении 2.
Примечание. Типы разъемов, указанные в пп.2.2, 2.3, 2.4.7, 2.5.3, а также требования к интерфейсам, изложенные в пп.2.4.2 и 2.7, являются предпочтительными.
ПРИЛОЖЕНИЕ 1 (обязательное). ПРЯМОУГОЛЬНЫЕ РАЗЪЕМЫ ДЛЯ ЧАСТОТЫ НИЖЕ 3 МГц
ПРИЛОЖЕНИЕ 1
Обязательное
1. Требования к сочленению
Установленное контактное сопротивление должно гарантироваться в пределах заданных размеров (черт.1, табл.4).
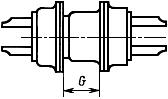
Черт.1
Таблица 4
Типоразмер корпуса | Число контактов |
|
1 | 9 | 6,35-7,11 |
2 | 15 | 6,35-7,11 |
3 | 25 | 6,12-6,88 |
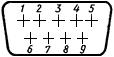
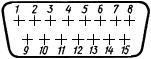
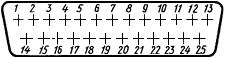
2. Схемы расположения контактов, вид с лицевой стороны для разъемов со штыревыми контактами или вид с монтажной стороны для разъемов с гнездовыми контактами (табл.5)
Таблица 5
Типоразмер корпуса | Число контактов | Разъем со штыревыми контактами |
1 | 9 |
|
2 | 15 |
|
3 | 25 |
|
3. Разъемы со штыревыми контактами
3.1. Габаритные размеры (черт.2, табл.6).
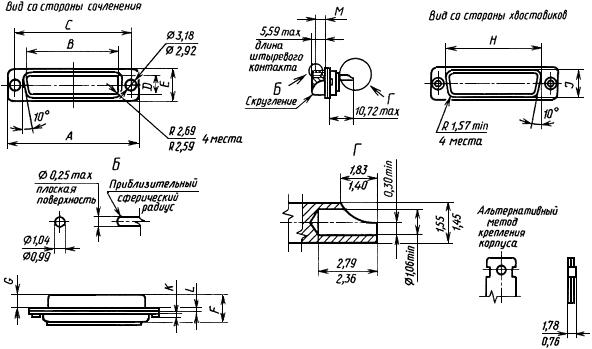
Черт.2
Примечание. Штыревой контакт должен иметь круглое поперечное сечение с допуском 0,051 мм по всей длине размера ![]() , измеренного с помощью индикатора.
, измеренного с помощью индикатора.
Таблица 6
Размеры, мм
Типо- | Число кон- |
|
|
|
|
|
|
|
|
|
|
|
|
1 | 9 | 31,19- | 17,04- | 25,12- | 8,48- | 12,93- | 10,97- | 6,05- | 19,53- | 10,97- | 1,78 | 1,02- | 4,04 |
2 | 15 | 39,52- | 25,37- | 33,45- | 8,48- | 12,93- | 10,97- | 6,05- | 27,76- | 10,97- | 1,78 | 1,02- | 4,04 |
3 | 25 | 53,42- | 39,09- | 47,17- | 8,48- | 12,93- | 11,07- | 5,99- | 41,53- | 10,97- | 1,78 | 1,24- | 3,81 |
3.2. Размеры схем расположения контактов (черт.3)
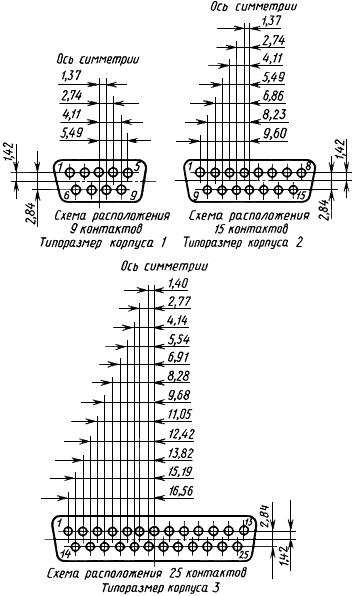
Черт.3
4. Разъемы с гнездовыми контактами
4.1. Габаритные размеры (черт.4, табл.7)
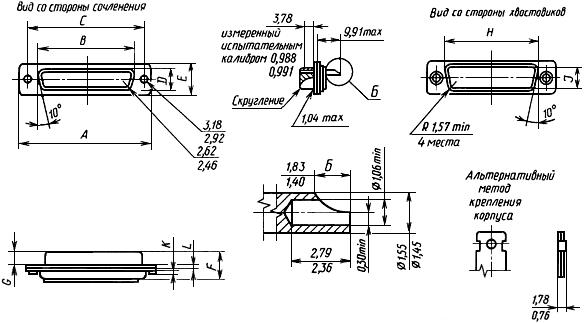
Черт.4
Таблица 7
Размеры, мм
Типо- | Число кон- |
|
|
|
|
|
|
|
|
|
|
|
1 | 9 | 31,19- | 16,46- | 25,12- | 8,03- | 12,93- | 11,15- | 6,30- | 19,53- | 10,97- | 1,78 | 1,02- |
2 | 15 | 39,52- | 24,79- | 33,45- | 8,03- | 12,93- | 11,15- | 6,30- | 27,76- | 10,97- | 1,78 | 1,02- |
3 | 25 | 53,42- | 38,51- | 47,17- | 8,03- | 12,93- | 11,15- | 6,30- | 41,53- | 10,97- | 1,78 | 1,02- |
4.2. Размеры схем расположения (см. п.3.2)
5. Требования к установке приборных разъемов (с гнездовыми или штыревыми контактами, черт.5)
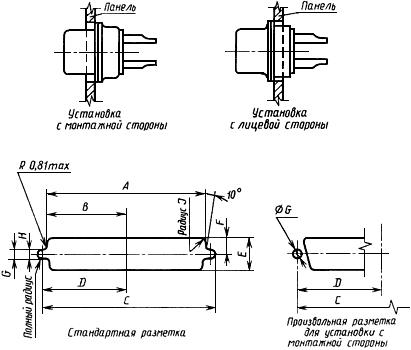
Черт.5
6. Размеры для разметки панели (табл.8)
Таблица 8
Размеры, мм
Типо- | Число кон- | Метод установки |
|
±0,13 |
±0,13 |
±0,13 |
±0,13 |
±0,13 |
±0,05 |
±0,05 |
±0,13 |
1 | 9 | С лицевой стороны | 22,2 | 11,1 | 25,0 | 12,5 | 13,0 | 6,5 | 3,1 | 1,5 | 2,1 |
С монтажной стороны | 20,5 | 10,2 | 25,0 | 12,5 | 11,4 | 5,7 | 3,1 | 1,5 | 3,4 | ||
2 | 15 | С лицевой стороны | 30,5 | 15,3 | 33,3 | 16,7 | 13,0 | 6,5 | 3,1 | 1,5 | 2,1 |
С монтажной стороны | 28,8 | 14,4 | 33,3 | 16,7 | 11,4 | 5,7 | 3,1 | 1,5 | 3,4 | ||
3 | 25 | С лицевой стороны | 44,3 | 22,2 | 47,0 | 23,5 | 13,0 | 6,5 | 3,1 | 1,5 | 2,1 |
С монтажной стороны | 42,5 | 21,3 | 47,0 | 23,5 | 11,4 | 5,7 | 3,1 | 1,5 | 3,4 |
ПРИЛОЖЕНИЕ 2 (рекомендуемое). ПРИМЕРЫ ИНТЕРФЕЙСОВ
ПРИЛОЖЕНИЕ 2
Рекомендуемое
Примерами интерфейсов, имеющих магистральную структуру, могут служить интерфейс Bitbus фирмы Intel и интерфейсы по стандартам США MIL-1553 В и MIL-1773.